



Проблема безопасности дорожного движения на автомобильных дорогах является актуальной, поскольку связана со значительными жертвами и материальными потерями при дорожно-транспортных происшествиях (ДТП) [1].
Количество происшествий, при прочих равных условиях, зависит от интенсивности движения, которая определяет скорости автомобилей, закономерности движения транспортных потоков и эмоциональную напряженность водителей.
При малой интенсивности движения действия водителей определяются только восприятием ими дорожных условий. Некоторые водители, развивая слишком высокую скорость движения, снижают не только свое внимание, но и реакцию на изменения дорожной обстановки. Тем самым создаются благоприятные условия для возникновения ДТП.
Относительное количество ДТП на дорогах с малой интенсивностью движения выше, чем при большой интенсивности. Такая картина характерна и для периодов спада движения на дорогах в утренние и вечерние часы [1].
Таким образом, в качестве основного фактора безопасности дорожного движения выступает своевременная оценка водителем дальности до объектов, находящихся на дороге, которая определяется метеорологической дальностью видимости.
Требование безопасности движения автомобиля математически может быть записано в следующем виде [5]:
 (1)
(1)
где Sвид – дальность (расстояние) видимости, препятствий, м; Sост – остановочный путь автомобиля, м; КЭ – коэффициент эффективности торможения; ϕ – коэффициент сцепления колес с дорогой; Va – скорость движения автомобиля, км/ч; TS – суммарное время распознавания водителем препятствия, реакции водителя и срабатывания привода тормозов, с; So – расстояние между остановившимся автомобилем и дорожным объектом, м.
Это означает, что водитель может объективно оценивать дорожную обстановку и обеспечить безопасность движения, если расстояние видимости объектов на дороге не меньше остановочного пути автомобиля. На основании этого применяют коэффициент безопасности:
 (2)
(2)
Расстояние видимости объектов на дороге днем может быть определено известным соотношением [1]:
 (3)
(3)
Определяя остановочный путь только с использованием первого члена многочлена (1), для расчета КБможно рекомендовать следующее выражение:
 (4)
(4)
Параметр КБ нужно рассматривать как комплексный показатель безопасности движения по условиям видимости, так как он учитывает основные параметры системы дорожного движения. Исходя из необходимого условия безопасности КБ ≥ 1, зная или задаваясь «неуправляемыми» параметрами, характеризующими прозрачность атмосферы (k),зрительные функции и условия освещения (ε), можно оценивать и нормировать другие параметры, определяющие безопасность движения и видимость. В частности, минимально допустимые контрасты, видимость препятствий, расположенных на дороге и допустимые скорости движения [5].
При отсутствии факторов, ухудшающих прозрачность атмосферы (k) визуальный контакт водителя с препятствиями, расположенными на дороге, определяется геометрической дальностью видимости. Траекторию последней определяет поведение вертикального профиля показателя преломления в слое атмосферы, расположенной над дорогой, причем этот слой может быть представлен как совокупность i-слоев с различными преломляющими свойствами.
Поскольку нижние слои атмосферы характеризуются значительной изменчивостью влагосодержания, наличием инверсий температуры, то и вертикальный профиль показателя преломления может существенно изменяться, что в свою очередь может приводить к появлению значительных ошибок визуального определения положения препятствий, расположенных на дороге. Так в утренние и вечерние часы препятствия, расположенные на дороге, наблюдаются ближе, а днем дальше своего истинного положения [3].
Восстановление вертикального профиля показателя преломления атмосферы (n) осуществляется по известной зависимости последнего от абсолютной температуры воздуха (T), атмосферного давления (p) и парциального давления водяного пара (e) [4] в каждом i-слое атмосферы [4]:

где Ni – выражен в «N-единицах».
При определении геометрической дальности препятствий, расположенных на дороге, с учетом вертикального профиля показателя преломления атмосферы, может быть использована методика, рассмотренная в [2].
Пусть водитель находится в транспортном средстве в точке А на высоте h0 от поверхности дороги (рис. 1). Геометрическая дальность препятствия В, расположенного на дороге от транспортного средства, определяется проекцией траектории наблюдения из точки А до препятствия В на ось ОХ, направленную вдоль поверхности дороги. Для удобства рассмотрения будем считать, что начало вертикальной оси совпадает с точкой А, а сама ось, направлена вниз, к поверхности дороги. Наблюдение препятствия В производится под углом ϕ0 к горизонту.
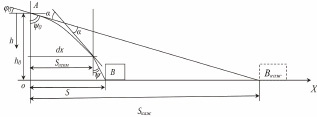
Рис. 1. Реальное и кажущееся положение препятствий, расположенных на дороге
Величина угла относительно перпендикуляра, опущенного из точкиА на поверхность дороги, будет равна 
В связи с изменением вертикального профиля показателя преломления с высотой угол ψ, составляемый касательной к траектории наблюдения и перпендикуляром к поверхности дороги, будет отличаться от φ0 на величину угла рефракции α.
Рассмотрим, как меняются угол ψ и проекция траектории наблюдения на поверхность дороги Sгеом с высотой. Предположим, что земная поверхность является плоской (то есть пренебрегаем её кривизной), а атмосфера может быть представлена как совокупность тонких слоев. Каждый такой слой характеризуется постоянным значением показателя преломления.
Если наблюдение расположенного на дороге препятствияВ ведется в выбранной системе координат из слоя с показателем преломления n0 = n(0), а нижележащий слой толщины dh имеет показатель преломления n = n(h), то для точки пересечения траектории наблюдения с этим слоем справедливо соотношение:
 (6)
(6)
Дифференцируя (6) по х, получаем
 (7)
(7)
Так как  (8)
(8)
то выражение (7) примет вид:
 (9)
(9)
Тогда на основании (8) и (9) выражения, определяющие зависимости угла ψ и проекции траектории наблюдения препятствия В, расположенного на дороге через слой атмосферы с высоты h, можно записать как
 (10)
(10)
Подставляя в (10)
 (11)
(11)
и учитывая, что ψ = φ0 – α, окончательно имеем:
 (12)
(12)
В итоге получаем:
 (13)
(13)
а угол между касательной к траектории наблюдения и перпендикуляром к поверхности дороги на верхней границе i-го слоя
 (14)
(14)
где

вертикальный градиент показателя преломления i – го слоя атмосферы, hi – высота слоя атмосферы относительно поверхности дороги,

Выражение для ошибки визуального определения горизонтальной дальности до препятствия, расположенного на дороге,
можно записать в виде:
 (15)
(15)
Здесь h0 tg ψ0 – горизонтальная дальность до препятствия при прямолинейной траектории наблюдения.
Величина ошибок определения горизонтальной дальности до препятствий, расположенных на дороге, зависит от поведения показателя преломления атмосферы с высотой, мощности слоев,в которых наблюдаются эти изменения, а также от величины угла наблюдения препятствий расположенных на дороге, по отношению к горизонту [2].
Таким образом, по аналогии с (4) и учитывая преломляющие свойства слоя атмосферы, прилегающего к дорожному покрытию, для расчета К*Б предлагается использовать следующее выражение:
 (16)
(16)
Используя полученное соотношение (16), в качестве примера были проведены расчеты коэффициентов безопасности КБ, результаты которых представлены на рис. 2 в виде графических зависимостей коэффициента безопасности (КБ) от скорости движения транспортных средств (V, км/ч).
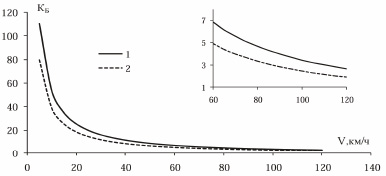
Рис. 2. Зависимость коэффициента безопасности движения от скорости движения транспортных средств: 1 – без учета, 2 – с учетом преломляющих свойств слоя атмосферы прилегающего к дорожному покрытию
При проведении расчетов были использованы следующие граничные условия: рекомендуемый коэффициент эффективности тормозной системы КЭ = 1,3; значение коэффициента сцепления колес с поверхностью сухой цементобетонной автомобильной дороги ϕ = 0,65; разность температур между дорожным покрытием и воздухом, равная 2 °С.
Заключение
Из хода кривых, представленных на рис. 2, видно, что увеличение скорости движения транспортных средств (V) приводит к снижению коэффициента безопасности движения (КБ). Так, полученные значения К*Б с учетом преломляющих свойств слоя атмосферы, прилегающего к дорожному покрытию (кривая 2) отличаются от аналогичного параметра КБ, рассчитанного классическим способом без такого учета (кривая 1).
Расчетным путем по (4) и (16) и граничным условиям, описанным выше, было установлено, что при разностях значений температуры (∆t) между температурой слоя атмосферы, прилегающего к дорожному покрытию, и температурой воздуха наблюдаются завышения и занижения коэффициента безопасности движения (КБ).
Завышение значений происходит в случае, когда температура слоя атмосферы, прилегающего к дорожному покрытию, выше температуры воздуха, занижение значений происходит в противном случае.
Сведения о завышении/занижении коэффициента безопасности движения представлены в таблице.
Величина завышения/занижения коэффициента безопасности движения
|
D |
2° |
3° |
4° |
5° |
6° |
7° |
8° |
9° |
10° |
|
D |
3,6% |
± |
± |
± |
± |
± |
± |
± |
± |
Здесь  , где КБ и К*Б рассчитываются по (4) и (16) соответственно.
, где КБ и К*Б рассчитываются по (4) и (16) соответственно.
Полученную информацию целесообразно учитывать при решении вопросов, связанных с организацией безопасности дорожного движения.
Рецензенты:
Душкин А.В., д.т.н., доцент, начальник кафедры управления и информационно-технического обеспечения, ФКОУ ВПО Воронежский институт ФСИН России, г. Воронеж;
Ирхин В.П., д.т.н., доцент, профессор кафедры основ радиоэлектроники, ФКОУ ВПО Воронежский институт ФСИН России, г. Воронеж.
Работа поступила в редакцию 24.06.2014.
Библиографическая ссылка
Бобров В.Н. ОЦЕНИВАНИЕ ПАРАМЕТРОВ ДВИЖЕНИЯ ПО ВЕРОЯТНОСТНЫМ МОДЕЛЯМ ГРАДИЕНТНОЙ АТМОСФЕРЫ // Фундаментальные исследования. 2014. № 9-3. С. 506-510;URL: https://fundamental-research.ru/ru/article/view?id=34876 (дата обращения: 25.06.2026).