



Известно, что современная промышленность располагает достаточно широким рядом информационно-измерительных устройств и систем, построенных на базе различных магниторезистивных эффектов, как следствие, с той или иной точностью обеспечивая регистрацию параметров магнитных полей в некотором амплитудно-частотном диапазоне. С другой стороны, очевидно, что одним из перспективных и эффективных типов магниторезистивных преобразователей на сегодняшний день являются элементы, в основе действия которых лежит так называемый анизотропный магниторезистивный эффект (АМР).
Хотя о существовании АМР-эффекта известно достаточно давно, серийное производство датчиков на его основе с характеристиками, сопоставимыми, а в некоторых случаях превосходящими феррозондовые преобразователи, освоено промышленностью не далее, как в последнее десятилетие (корпорации «Honeywell», «NXP semiconductors» и др.).
В этой связи на сегодняшний день имеется лишь ряд разрозненной информации (преимущественно англоязычной), количественно характеризующей технико-метрологические показатели АМР-сенсора конкретной модели или серии. Наличие же специализированной технической литературы и единой теории по данной тематике не обнаружено. Очевидно, что такое положение дел существенно затрудняет процесс разработки информационно-измерительных систем, построенных на базе АМР-элементов, специалистам в области измерительной аппаратуры.
Целью настоящей работы, прежде всего, является анализ и систематизация знаний и опыта, относящихся к конструированию АМР-сенсорных модулей, а также ИИС и геоинформационных систем, построенных на их основе.
Математическое моделирование АМР-преобразователя
Из работ [1, 6] известно, что в случае отдельно взятого АМР-элемента приложенное к нему внешнее (исследуемое) магнитное поле H поворачивает вектор намагниченности тонкой магнитной пленки на угол β. Значение β зависит от направления и величины H, при этом сопротивление пермаллоевой пленки оценивается согласно выражению (1), при условии, что H << H0, где H0 – подмагничевающее поле.
 (1)
(1)
где RВ = 0 - сопротивление пермаллоевой пленки вне действия магнитного поля; ΔR - максимально возможное изменение сопротивления (RВ = 0 = 3,8-4,2 %); sin β = Н/H0.
Из выражения (1) легко заметить, что сопротивление АМР-элемента квадратично зависит от слагаемого (H/H0) при H0 = const. Такая квадратичная зависимость отдаляет выходную характеристику сенсора от желаемого линейного вида. В значительной мере лианеризовать выходную характеристику АМР-элемента возможно путем задания так называемой «зазубренной» (англ. barber-pole) структуры. В этом случае сопротивление АМР-сенсора будет определяться соотношением:
 (2)
(2)
где угол 45° соответствует углу наклона пермаллоевых и немагнитных полосок относительно общей ориентации АМР-элемента в пространстве (1).
Учитывая, что

можем записать:
 (3)
(3)
Знак «±» в выражении (3) соответствует одной из возможных ориентаций немагнитных перемычек, т. е. их наклон либо слева направо, либо справа налево.
В случае, когда H << H0, выражение (3) допустимо переписать в виде:
 (4)
(4)
Очевидно, что функциональные зависимости (3)–(4) имеют более предпочтительный квазилинейный характер по сравнению с выражением (1).
Рассмотрим соединение единичных АМР-элементов по принципу полностью дифференциального измерительного моста. Физически данная структура представляет собой четыре эквивалентных «barber-pole» АМР-элемента, сформированных путем осаждения тонкого слоя пермаллоя на подложку в форме квадрата, соединенных по схеме, представляющей из себя плечи измерительного моста. Напряжение, снимаемое с измерительной диагонали такого моста, будет определяться в соответствии с выражением:
 (5)
(5)
где U – напряжение, снимаемое с измерительной диагонали моста; R1, R2, R3, R4 – сопротивление плеч измерительного моста; U0 – напряжение питания моста.
Согласно выражениям (3) и (4) и предполагая, что все АМР-элементы, входящие в состав измерительного моста, физически эквивалентны между собой, выражение (5) для случая АМР-измерительного моста можно переписать в виде:
 (6)
(6)
Из выражения (6) очевидно, что напряжение на выходе мостового АМР-сенсора, квазилинейно по своей природе, прямо пропорционально зависит от напряжения питания моста и чувствительно к знаку поля. Таким образом, выражение (6) представляет собой универсальную математическую модель мостового АМР-сенсора, учитывающую основные процессы, протекающие в тонких магнитных пленках типа «barber-pole».
Анализ структуры магнитных АМР-сенсорных модулей
На рис. 1 представлена структура АМР-сенсорного модуля. Использование в ее составе элемента подмагничивания в виде плоской катушки индуктивности (рис. 1, позиция 4), согласно [5], повышает чувствительность мостового АМР-преобразователя, а также линеаризует выходной сигнала.
Устройство вертикального смещения информационного отклика магнитного сенсорного модуля (рис. 1, позиция 2), в свою очередь, предназначено для нейтрализации поля смещения и компенсации постоянной составляющей магнитных помех.
Вопросы конструирования устройства подмагничивания
Устройство подмагничивания может быть реализовано как посредством постоянного магнита, так и на базе электромагнита (плоской катушки индуктивности: позиция 4 на рис. 1), расположенного в непосредственной близости от рабочего тела датчика.
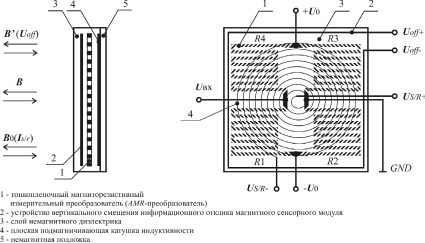
Рис. 1. Структура АМР-сенсорного модуля
В последнем случае индуктивность L, [мкГн], в зависимости от геометрических характеристик, определится из выражений (7) [1]:
 (7)
(7)
где Lкв и Lкр - индуктивность катушки квадратной и круглой конфигурации соответственно; Dср = (Dвн + Dн)/2 - средний диаметр спирали, [см]; aср = (Aвн + Aн)/2 - длина средней стороны квадрата, [см]; t - радиальная ширина намотки, [см]; N - количество витков.
Рассматривая плоскую катушку индуктивности как совокупность витков с током различного радиуса, расположенных на одной оси и в одной плоскости, согласно закону Био–Савара–Лапласа и принципа суперпозиции, обеспечивается возможность определить зависимость генерируемой магнитной индукции в геометрических центрах спиралевидной плоской катушки, от номинала протекающего по ее контуру электрического тока:
 или
или  ;
;
 (8)
(8)
Управление устройством подмагничивания
Основной задачей системы управления элементом подмагничивания (рис. 2) является генерация управляющих токовых импульсов через плоскую катушку индуктивности. Для решения поставленной задачи возможны различные схемотехнические подходы, однако анализ потенциальных принципов построения такого рода генераторов выявил, что наиболее целесообразным является подход, в основе которого лежат эффекты переходных процессов, возникающие при кратковременной коммутации тока через RC-цепь второго порядка.
Схемотехническая модель такой RC-цепи (для АМР-сенсора типа HMC1001) представлена на рис. 2, где R2 – сопротивление подмагничивающего элемента.
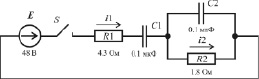
Рис. 2. Модель-схема генератора токовых импульсов
Здесь (рис. 2) ток i2, рассчитанный согласно законам коммутации, однозначно определится выражением (9) и будет изменяться во времени так, как показано на рис. 3.
 (9)
(9)
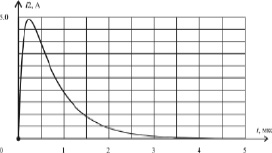
Рис. 3. Ток коммутации i2(t)
В конечном итоге, согласно выражениям (8)–(9), индукция подмагничивающего поля будет изменяться по закону:
 (10)
(10)
где η – коэффициент геометрической формы плоской спиралевидной катушки индуктивности (η = N/2a – для квадратной спирали и η = N/2Dср – для круглой спирали).
Элементы теории конструирования устройства вертикального смещения информационного отклика АМР-сенсора
На практике при проектировании сенсорных магнитных модулей вероятны ситуации, когда в предполагаемом отсутствии внешнего магнитного воздействия выходной информационный сигнал на выходе АМР-сенсора не соответствует нулевому уровню.
Природа подобных смещений информационного сигнала может объясняться как неучтенными источниками магнитного поля (ферромагнитные элементы корпуса, электронных элементов или разъемов), так и неидеальным исполнением непосредственно самого АМР-сенсора или свойствами среды.
Исключить на начальных стадиях обработки информационного сигнала влияние данных факторов на результат проводимых измерений технически достаточно сложно. В случае же нахождения информационного сигнала преимущественно в ультранизкой области частот (например, геомагнитное поле) проблема нулевого смещения информационного отклика АМР-сенсорного модуля приобретает особо актуальный характер.
В качестве решения данной проблемы предлагается использовать компенсирующий электромагнит (в виде плоской катушки индуктивности), активизируя который обеспечивается возможность (по принципу суперпозиции) компенсировать постоянную составляющую внешних магнитных наводок и выводить тем самым информационный сигнал магнитного сенсора в нулевое положение при условно нулевом воздействии внешнего магнитного поля.
Магнитная индукция (напряженность), генерируемая таким магнитом, будет определяться в соответствии с выражениями (8) и зависеть как от геометрических параметров спиралевидной катушки индуктивности, так и от параметров пропускаемого через нее электрического тока.
В результате предлагаемый подход позволит как улучшить параметры выходного сигнала АМР-сенсорного модуля в частности, так и повысить метрологические характеристики магнитометрической ИИС, построенной на его основе, в целом.
В случае необходимости возможен подход к управлению током в контуре смещения по средствам цифро-аналоговых преобразователей либо цифровых переменных резисторов.
Аналитическое описание АМР-сенсорного модуля
На основании проведенных исследований синтезирована аналитическая формулировка, относящаяся к АМР-сенсору типа HMC1001:
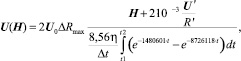
где U – информационный сигнал, снимаемый с измерительной диагонали моста; U0 – напряжение питания измерительного моста; H – напряженность измеряемого магнитного поля; U’ – напряжение питания устройства вертикального смещения информационного отклика; R’ – сопротивление устройства вертикального смещения информационного отклика; t1 и t2 – начальный и конечный момент подмагничивающего импульса соответственно; Δt = t2–t1 [6–7].
Заключение и выводы
Таким образом, в настоящей статье исследованы АМР-сенсоры и сенсорные модули. Предложены, проанализированы и представлены схемотехнические и конструкторские решения, обеспечивающие эффективную работу АМР-сенсоров, а также получены аналитические выражения, необходимые как при теоретических исследованиях АМР-сенсорных структур и систем, так и в процессах отладки, калибровки и настройки магнитометрических информационно-измерительных и геоинформационных систем, построенных на их основе.
Работа поддержана грантами РФФИ №№ 14-07-00260-а, 14-07-31344-мол-а.
Рецензенты:
Веревкин А.П., д.т.н., профессор, зав. кафедрой автоматизации технологических процессов и производств, ФГБОУ ВПО «Уфимский государственный нефтяной технический университет», г. Уфа;
Даринцев О.В., д.т.н., ведущий научный сотрудник, зав. лабораторией «Робототехника и управление в технических системах», ФГБУН «Институт механики им. Р.Р. Мавлютова», г. Уфа.
Работа поступила в редакцию 04.04.2014.
Библиографическая ссылка
Воробьев А.В., Шакирова Г.Р., Попкова Е.Е., Иванова Г.А. ТЕОРЕТИЧЕСКИЕ ИССЛЕДОВАНИЯ, МОДЕЛИРОВАНИЕ И АНАЛИЗ АНИЗОТРОПНЫХ МАГНИТОРЕЗИСТИВНЫХ ПРЕОБРАЗОВАТЕЛЕЙ // Фундаментальные исследования. 2014. № 6-1. С. 24-28;URL: https://fundamental-research.ru/ru/article/view?id=34101 (дата обращения: 01.07.2026).