



Статья посвящена определению базового образца для оцениваемого объекта с применением таксономической квалиметрии и теории неопределенности [1, 2].
В качестве объекта анализа был выбран гидрораспределитель механизированной крепи типа М 130.07.110, изготавливаемый на базе ТОО «МашЗавод № 1» (рисунок).
Определена цель исследования: установить базовый образец для оцениваемого объекта.
Сформулированы задачи исследования: сформировать матрицу наблюдений, произвести стандартизацию признаков; произвести дифференциацию признаков матрицы наблюдений; выполнить процедуры сравнительного анализа при помощи таксономической квалиметрии; определить эталон развития для каждого типа гидрораспределителя; рассчитать показатель уровня развития di каждого гидрораспределителя.
Для сопоставления объектов, характеризуемых большим числом признаков, чаще всего применяются таксономические процедуры. Одним из первых методов исследования многомерных объектов был предложенный З. Хэльвингом таксономический показатель уровня развития. Этот показатель представляет собой синтетическую величину, «равнодействующую» всех признаков, характеризующих единицы исследуемой совокупности, что позволяет с его помощью линейно упорядочить элементы данной совокупности [3, 4]. Процесс построения таксономического показателя уровня развития начинается с определения элементов матрицы наблюдений X. Допустим, у нас имеется множество из ω элементов, описываемых n признаками; тогда каждую единицу можно интерпретировать как точку n-мерного пространства с координатами, равными значениям n признаков для рассматриваемой единицы. Тогда матрица наблюдений имеет вид:
 (1)
(1)
где ω – число единиц; n – число признаков; xik – значение признака k для единицы i.
В данном исследовании матрица содержит численные значения определяющих единичных показателей оцениваемого гидрораспределителя типа М 130.07.110 и четырех образцов-аналогов. Значения показателей качества оцениваемого изделия и четырех образцов-аналогов приведены в табл. 1 [5].
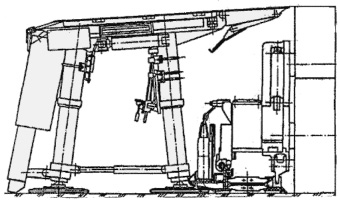
Общий вид механизированной крепи типа М 130
Таблица 1
Значения показателей качества оцениваемого изделия и образцов-аналогов
|
Показатели качества |
Типы гидрораспределителей соответствующих крепей |
||||
|
М130 |
ОКП70 |
2УКП |
«Пиома» |
«Глинник» |
|
|
Условный проход, мм |
12 |
8 |
10 |
12 |
16 |
|
Давление на входе номинальное, МПа |
32 |
32 |
33 |
30 |
35 |
|
Давление на входе максимальное, МПа |
48 |
40 |
40 |
48 |
45 |
|
Расход рабочей жидкости, л/мин |
120 |
100 |
120 |
120 |
130 |
|
Усилие на рукоятке управления, кг |
10 |
10 |
12 |
12 |
15 |
Признаки, включенные в матрицу наблюдений, неоднородны, поскольку описывают разные свойства объектов. Кроме того, различаются их единицы измерения, что еще более затрудняет выполнение некоторых арифметических действий, необходимых в отдельных процедурах. Поэтому надлежит выполнить предварительное преобразование, которое заключается в стандартизации признаков. Это преобразование производится в соответствии с формулой:
 (2)
(2)
причем:
 (3)
(3)
 (4)
(4)
где k – 1,2, …, n; xik – значение признака k для единицы i;  – среднее арифметическое значение признака k; sk – стандартное отклонение признака k; zik – стандартизованное значение признака k для единицы i.
– среднее арифметическое значение признака k; sk – стандартное отклонение признака k; zik – стандартизованное значение признака k для единицы i.
Следующий шаг в рассматриваемой процедуре заключается в дифференциации признаков матрицы наблюдений. Все переменные делятся на стимуляторы и дестимуляторы. Основанием разделения признаков на две группы служит характер влияния каждого из них на уровень развития изучаемых объектов. Признаки, оказывающие положительное, стимулирующее влияние на уровень развития объектов, называются стимуляторами, в отличие от признаков, которые оказывают тормозящее влияние и поэтому называются дестимуляторами. Разделение признаков на стимуляторы и дестимуляторы служит основой для построения так называемого эталона развития, который представляет собой точку Р0 с координатами z01, z02, …, z0n и определяется следующим образом:
 если s ∈ I, (5)
если s ∈ I, (5)
 если s ∈ I (s = 1, ..., n), (6)
если s ∈ I (s = 1, ..., n), (6)
где I – множество стимуляторов; zrs – стандартизованное значение признака s для единицы r.
Расстояние между отдельными точками-единицами и точкой P0, представляющей эталон развития, обозначается  и рассчитывается следующим образом:
и рассчитывается следующим образом:
 , (i = 1, …, ω). (7)
, (i = 1, …, ω). (7)
Полученные расстояния служат исходными величинами, используемыми при расчете показателя уровня развития, рассчитываемого по формуле:
 (8)
(8)
где
 (9)
(9)
 (10)
(10)
 (11)
(11)
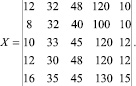
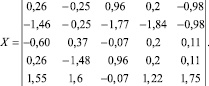
Сформируем по данным таблицы матрицу наблюдений (1), в столбцах которой расположены одноименные показатели, в строках – все определяющие единичные показатели одного из образцов-аналогов:
Признаки, включенные в матрицу наблюдений, неоднородны, поскольку описывают разные свойства гидрораспределителей. Поэтому необходимо произвести стандартизацию признаков в соответствии с формулой (2). Для начала определим среднее арифметическое значение  признака k согласно выражению (3). Далее вычислим стандартное отклонение sk (стандартная неопределенность типа А) признака k по формуле (4), произведем стандартизацию каждого признака в отдельности в соответствии с формулой (2). Полученные результаты приведены в табл. 2.
признака k согласно выражению (3). Далее вычислим стандартное отклонение sk (стандартная неопределенность типа А) признака k по формуле (4), произведем стандартизацию каждого признака в отдельности в соответствии с формулой (2). Полученные результаты приведены в табл. 2.
Таблица 2
Результаты вычислений
|
№ п/п |
Наименование одноименного показателя |
Среднее арифметическое значение |
Стандартное отклонение, sk |
Стандартизированное значение каждого признака, zik |
|
1 |
Условный проход, мм |
|
S1 = 2,33 |
Z11 = 0,26; Z21 = –1,46; Z31 = 0,60; Z41 = 0,26; Z51 = 1,55; |
|
2 |
Давление на входе номинальное, МПа |
|
S2 = 1,62 |
Z12 = –0,25; Z22 = –0,25; Z32 = 0,37; Z42 = –1,48; Z52 = 1,6; |
|
3 |
Давление на входе максимальное, МПа |
|
S3 = 2,93 |
Z13 = 0,96; Z23 = –1,77; Z33 = –0,07; Z43 = 0,96; Z53 = –0,07; |
|
4 |
Расход рабочей жидкости, л/мин |
|
S4 = 9,8 |
Z14 = 0,2; Z24 = –1,84; Z34 = 0,2; Z44 = 0,2; Z54 = 1,22; |
|
5 |
Усилие на рукоятке управления, кг |
|
S5 = 1,83 |
Z15 = –0,98; Z25 = –0,98; Z35 = 0,11; Z45 = 0,11; Z55 = 1,75; |
 признака k
признака k





По полученным численным значениям стандартизованных признаков получим матрицу вида:
Следующий шаг заключается в дифференциации признаков матрицы наблюдений – разделение их на стимуляторы и дестимуляторы. По данным таблицы 1 к стимуляторам можно отнести следующие показатели: условный проход, давление на входе максимальное и минимальное; к дестимуляторам – расход рабочей жидкости, усилие на рукоятке управления.
Согласно формулам (5), (6) получаем:





Основанием выбора конкретных численных значений из матрицы служит разделение признаков на стимуляторы и дестимуляторы (выбор максимального/минимального стандартизованного значения одноименного признака по столбцам в зависимости от принадлежности/непринадлежности ко множеству стимуляторов I).
Теперь приступим к расчету показателя уровня развития di каждого гидрораспределителя в отдельности, согласно (8). Для этого определим эталон развития для каждого типа гидрораспределителя, используя формулу (7), а также обобщенный эталон развития c0, с учетом каждого эталона в отдельности согласно (9). Результаты вычислений для определения показателя уровня развития приведены в табл. 3.
Таблица 3
Результаты вычислений для определения показателя уровня
|
№ п/п |
Тип гидрораспределителя |
Эталон развития сi0 |
Обобщенный эталон развития c0 |
Показатель уровня развития di |
|
1 |
М130 |
С10 = 3,05 |
4,89 |
d1 = 0,62 |
|
2 |
ОКП70 |
С20 = 4,46 |
d2 = 0,91 |
|
|
3 |
2УКП |
С30 = 3,55 |
d3 = 0,73 |
|
|
4 |
«Пиома» |
С40 = 4,07 |
d4 = 0,83 |
|
|
5 |
«Глинник» |
С50 = 4,23 |
d5 = 0,87 |
Интерпретация показателя уровня развития di следующая: данная единица находится на тем более высоком уровне развития, чем ближе значение показателя уровня развития к нулю.
Численное значение показателя уровня развития рассматриваемого гидрораспределителя при вычислении оказалось равным 0,62, которое наиболее приближено к нулю по сравнению с аналогами.
По результатам полученных значений сформулированы выводы:
- оцениваемый гидрораспределитель типа М 130.07.110 находится на более высоком уровне развития по совокупности всех определяющих его признаков в сравнении с имеющимися аналогами;
- в качестве образца-аналога при проведении оценки качества необходимо использовать гидрораспределитель типа 2 УКП.
Рецензенты:
Туменов С.Н., д.т.н., профессор, проректор по науке и инновационным технологиям Алматинского технологического университета, г. Алматы;
Кенжин Б.М., д.т.н., профессор, директор ТОО «Карагандинский машиностроительный консорциум», г. Караганда.
Работа поступила в редакцию 06.03.2014.
Библиографическая ссылка
Жетесова Г.С., Жунусова А.Ш., Грицова Н.А. ПРИМЕНЕНИЕ ТАКСОНОМИЧЕСКОЙ КВАЛИМЕТРИИ И ЭЛЕМЕНТОВ ТЕОРИИ НЕОПРЕДЕЛЕННОСТИ ПРИ УСТАНОВЛЕНИИ БАЗОВОГО ОБРАЗЦА // Фундаментальные исследования. 2014. № 5-2. С. 256-259;URL: https://fundamental-research.ru/ru/article/view?id=33860 (дата обращения: 30.07.2026).