



Анализ современного состояния практики управления в технических системах показывает на необходимость создания средств автоматизации, позволяющих в реальном масштабе времени осуществлять оптимальное управление технологическими процессами (ТП). Реализация такого подхода возможна только при наличии интегрированных информационно-управляющих систем (ИУС), обеспечивающих решение широкого круга задач в автоматизированных системах управления (АСУ) ТП. В существующих системах управления отсутствуют компоненты, обеспечивающие решение аналитических (не говоря об интеллектуальных) задач. Это связано с тем, что реализация, например, функций поддержки принятия решений оперативным персоналом АСУ ТП требует от разработчиков этих систем не только знаний своей предметной области, но также и знаний об особенностях технологических процессов и управления ими, то есть знаний, относящихся к иной предметной области. Для разработчиков ИУС проще ограничиться созданием унифицированной информационной системы типа SCADA (Supervisory Control and Data Acquisition System). При оценке ситуаций и принятии решений оперативный персонал, используя предоставляемую ему информацию, будет действовать по старинке, то есть без интеллектуальной поддержки со стороны таких систем. В статье рассмотрена реализация методов интеллектуализации для управления перегрузочными процессами в морском порту.
Постановка задачи
Создание интеллектуальных систем (ИС) новых поколений для управления сложными ТП в различных условиях взаимодействия с внешней средой является одной из актуальных задач практических приложений методов искусственного интеллекта и когнитивного моделирования в целом [1, 3]. Функциональные возможности и интерфейс ИС существенно зависят от возможностей формализованного описания и полноты использования всего многообразия математических методов обработки данных. В связи с этим актуальна задача разработки специального формального аппарата, обеспечивающего единообразное представление моделей, синтезированных посредством различных методов и средств, с целью унификации операций их обработки в вычислительной среде [1–4].
Методы интеллектуализации процессов управления
В настоящее время получены практические результаты исследований, использующих для оперативного решения интеллектуальных задач управления промышленными предприятиями виртуальные методы организации и управления [2, 3]. Отметим технологии, за счет которых стало возможным внедрение в технологический процесс промышленных систем методов виртуального предприятия (ВП). К числу основных технологий по управлению, планированию и проектированию на производстве следует отнести: CAE, CAD, CAM, SCM, ERP, MPR-2, SCADA, CNC, CRM, S&SM и другие системы, которые входят в системы управления данными CPC или PLM [3].
Внедрение CRM-систем в реальном времени позволяет без изменения технологии работы увеличить производительность труда до 20 раз с практически двукратным увеличением доходов [2]. Применение методов ВП необходимо для оперативного поиска технологии нерегулярных промышленных грузопотоков с построением логистической системы доставки грузов от промышленного предприятия (поставщика) к потребителю и снижения трудоемкости получения технологических решений [2, 4]. Решение отмеченных выше задач возможно только при создании интеллектуальных систем (ИС) для управления сложными, слабоформализованными системами при использовании методов ВП в различных условиях взаимодействия. Функциональные возможности и интерфейс ВП существенно зависят от возможностей формализованного описания проявлений действительности и полноты использования всего многообразия математических методов обработки данных.
Для построения полимодельных комплексов используются два базовых принципа: принцип предельных обобщений и принцип полимодельной дополнительности и конкурентности. Несмотря на важность каждого принципа в отдельности, главный смысл предлагаемого подхода заключается в их глубинной взаимосвязи, что позволяет создавать самоорганизующиеся ИС, которые способны сохранять и улучшать свои параметры в процессе функционирования путем самообучения и самоорганизации на основе внутренней активности системы [1]. В предлагаемом решении все параметры и переменные моделей будем называть тестами. Пусть {t} – множество элементарных тестов, с помощью которых описываются все факторы, обстоятельства и явления, имеющие отношение к разработке ВП. Элементарность теста означает, что результат теста представим в виде «тест = значение». Конкретный результат теста t будем обозначать через t. Результаты тестов могут выбираться из разных доменов баз данных. Для фиксации того, что в качестве множества результатов теста t используется домен T, будем использовать нотацию t/T. Используя разные домены, можно управлять общностью результата одного и того же теста [1, 3].
Реализация интеллектуальной системы управления предприятием
Движение грузопотоков требует постоянного решения единичных ситуационных транспортных задач оперативного планирования и управления подчиненных индивидуальным целям функционирования. Построение дорогих логистических систем для этих задач экономически неэффективно. Поэтому основными требованиями для создания таких систем является быстрое создание с оптимальным потреблением ресурсов, безболезненная ликвидация по выполнению задачи, низкие издержки на создание и эксплуатацию. Применение методов ВП необходимо для оперативного поиска технологии нерегулярных промышленных грузопотоков с построением логистической системы доставки грузов от промышленного предприятия (поставщика) к потребителю и снижения трудоемкости получения технологических решений [2, 3]. Полученная при этом технологическая цепочка (TSPT) с централизованным управлением (UVE) является виртуальным транспортным предприятием – VLPT (рис. 1).
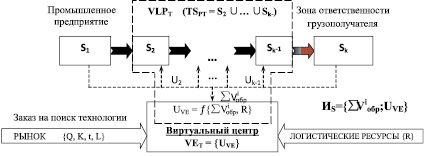
Рис. 1. Виртуальное транспортное предприятие
– переходные процессы технологических операций;
S1 – хранение готовой продукции на складе промпредприятия;
S2, …, Sk-1 – последовательность операций технологической цепочки доставки грузов от промышленного предприятия к потребителю;
Sk – операция после передачи промышленных грузов покупателю;
Q, K, t, L – соответственно величина, критерий оптимизации, время протекания и географические координаты зарождения и поглощения грузопотока, заданные как исходные данные к поиску технологических решений;
ИS – информационные связи элементов логистической системы с виртуальным центром.
Управление в системе осуществляется при помощи виртуального центра (VЕT), как реакция на обратную связь ( ) от элементов технологической цепочки и пунктов зарождения (S1) и поглощения (Sk) грузопотока и логистические ресурсы (R) [1, 2].
) от элементов технологической цепочки и пунктов зарождения (S1) и поглощения (Sk) грузопотока и логистические ресурсы (R) [1, 2].
Задача построения логистической системы грузопотока морского порта – LS, управляемой виртуальным центром (UVE), основывается на принципах p, принадлежащих общим принципам транспортных систем (p ∈ Р). Соответственно транспортные процессы нерегулярной грузопереработки f выбираются из множества существующих транспортных технологий F(p) так, что f ∈ F(p), а для выбранных транспортных процессов были подобраны необходимые транспортные средства  из средств A
из средств A  . Для решения поставленной выше задачи необходимо найти значения параметров логистической системы (RS), зависящих от накладываемых ограничений DS, взаимосвязей элементов транспортной сети ИS и изменяемых во времени критериальных оценок Kt(v(t – d), s) параметров системы. При условии минимизации целевой функции транспортного процесса (Сопт(t + t) → min) и адаптации критерия Kt к возмущающему воздействию во времени t.
. Для решения поставленной выше задачи необходимо найти значения параметров логистической системы (RS), зависящих от накладываемых ограничений DS, взаимосвязей элементов транспортной сети ИS и изменяемых во времени критериальных оценок Kt(v(t – d), s) параметров системы. При условии минимизации целевой функции транспортного процесса (Сопт(t + t) → min) и адаптации критерия Kt к возмущающему воздействию во времени t.
Информационное взаимодействие процессов функционирования терминалов морского порта
Функционирование инфраструктур, входящих в состав морского порта, а также их информационное взаимодействие с поставщиками грузов и грузополучателями, входящими в состав транспортной системы, математически описать невозможно. Это связано со сложным видом алгоритмического описания функционирования оборудования, входящего в состав технологических процессов обработки различных видов грузов, например, апатита, минеральных удобрений, угля, нефтепродуктов, контейнеров, труб и прочих. Рассмотрим возможность описания процессов, протекающих в цепях поставок транспортных систем, с использованием методов имитационного моделирования, математическим объектом которых являются дискретные динамические системы. Дискретная динамическая система DCml, описываемая имитационной моделью iml ∈ tim, будет рассматриваться как структура разнотипных компонентов технологических процессов, функционирование которых определено в пространстве состояний на некотором общем интервале времени. Это время будем отображать в имитационных моделях модельным временем  . Поведение структуры компонентов имитационной модели
. Поведение структуры компонентов имитационной модели  является множеством всех отображений
является множеством всех отображений  , которые описываются ступенчатыми функциями от времени. Тогда любое траекторное движение
, которые описываются ступенчатыми функциями от времени. Тогда любое траекторное движение  дискретной системы DCml будет описывать изменение состояния технических средств доставки и обработки грузов на интервале модельного времени τiml. В пространстве состояния на траекториях дискретных систем будем различать локальные LS и глобальные события GS [4]. Тогда событие
дискретной системы DCml будет описывать изменение состояния технических средств доставки и обработки грузов на интервале модельного времени τiml. В пространстве состояния на траекториях дискретных систем будем различать локальные LS и глобальные события GS [4]. Тогда событие  с номером i траектории
с номером i траектории  компонента DCml, можно определить в пространстве состояния и в функции времени как
компонента DCml, можно определить в пространстве состояния и в функции времени как

Рассмотрим использование метода имитационного моделирования процессов на примере функционирования терминала минеральных удобрений Мурманского морского торгового порта [5]. Общая модель деятельности терминала минеральных удобрений может быть записана как кортеж и имеет вид
DТMU = <OP, RP, Z, MF, PK> ,
где компоненты кортежа: OP – множество основных процессов, протекающих в терминале; RP – множество собственных ресурсов, участвующих в погрузочно-разгрузочных работах; Z – множество заявок на осуществление погрузочно-разгрузочных работ, поступающих от клиентов порта; MF – множество метеорологических факторов, влияющих на работу порта; PK – множество показателей качества логистического обслуживания.
Полученная матрица функций путей деятельности терминала минеральных удобрений имеет следующий вид:
W = [W8 W7 W6 W5 W4 W3 W2 W1].
Она позволяет осуществлять моделирование прохождения груза минеральных удобрений на территории терминала. Например, при прохождении пути: вагон – склад 3 будут задействованы транспортеры 1002, 1003, 1004, 1005, 1006 или функции W1, W4, на позиции функции пути в матрице ставится 0 или 1 в зависимости от того, проходит ли путь через функцию или нет. Матрица в таком случае будет представлена в виде функции путей
W = [0 0 0 0 1 0 0 1].
Таким образом, на входе модели должна находиться информация о выбранном пути транспортировки груза, а на выходе – матрица функций путей, определяющих, через какие транспортеры проходит сигнал.
На рис. 2 представлена модель, реализованная в пакете Simulink, и диаграмма Stateflow соответственно. Реализация алгоритма матрицы перемещений осуществляется подачей «0» или «1» на соответствующий вход блока Chart. Входы Rt_1, Rt_2, Rt_3, Rt_4 предназначены для задания маршрутов перемещения минеральных удобрений (таблица).
Маршруты перемещения минеральных удобрений
|
Rt_1 |
Склад 1 – Судно |
|
Rt_2 |
Склад 2 – Судно |
|
Rt_3 |
Склад 3 – Судно |
|
Rt_4 |
Вагон – Судно |
В блок Weight вводится количество груза в тоннах, которое необходимо погрузить на судно. Блоки Store 1, Store 2, Store 3 отображают количество груза в тоннах, которое находится на складах 1, 2, 3 соответственно. Блок Number of trucks показывает количество вагонов, находящихся на путях для разгрузки.
После ввода всех изначальных данных и выбора маршрута производится запуск программы. После этого в блоке Time отображается время в часах, необходимое для выполнения заданной операции погрузки. В блоках Store 1 after, Store 2 after, Store 3 after отображается количество груза, которое осталось на соответствующих складах. Блок Error предназначен для вывода сообщения об ошибке.
Заключение
Рассмотренные в статье подходы по реализации интеллектуального управления перегрузочными процессами на предприятии в морском порту с использованием методов виртуальных технологий позволили разработать структуру виртуального предприятия. Полученные математические модели управления процессами перемещения грузопотока минеральных удобрений позволяют решать с помощью пакета MATLAB задачи планирования выполнения работ по обработке грузов на терминале.
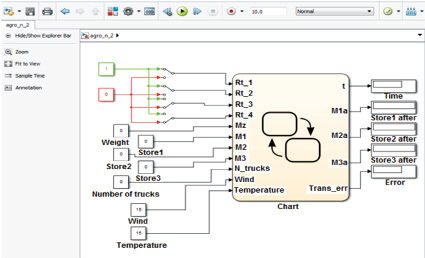
Рис. 2. Состав программы для решения задачи моделирования процесса перегрузки удобрений
Рецензенты:
Совлуков А.С., д.т.н., профессор, главный научный сотрудник института проблем управления им. В.А. Трапезникова РАН, г. Москва;
Середа В.И., д.т.н., профессор, проректор по информационным технологиям и дистанционному обучению МГТУ, заведующий кафедрой высшей математики и программного обеспечения ЭВМ, г. Москва.
Работа поступила в редакцию 16.08.2013.
Библиографическая ссылка
Прохоренков А.М., Истратов Р.А. РАЗРАБОТКА ИНТЕЛЛЕКТУАЛЬНОЙ СИСТЕМЫ ОПЕРАТИВНОГО УПРАВЛЕНИЯ ПРОМЫШЛЕННЫМ ПРЕДПРИЯТИЕМ // Фундаментальные исследования. 2013. № 10-4. С. 729-733;URL: https://fundamental-research.ru/ru/article/view?id=32391 (дата обращения: 02.08.2026).