



Задачи диагностирования асинхронных двигателей как во время эксплуатации их в составе судовых электроприводов, так и после выполнения ремонтных работ, требуют во время тестовых испытаний проверки не только электрической части асинхронной машины, но и снятия механических характеристик [5]. Наиболее эффективным решением является перевод асинхронного двигателя в генераторный режим с подачей механической нагрузки на ротор через воздействие тормозящего электромагнитного момента [2]. Это осуществляется при переключении источников питания электродвигателя от источника с большей частотой напряжения к источнику с меньшей. Подобный подход к диагностированию может быть применен при помощи преобразователей частоты. Однако в силу ряда обстоятельств генераторный режим асинхронной машины с активной нагрузкой является неустойчивым и возможен лишь на короткое время, пока энергии вращения ротора достаточно для удержания машины в режиме генерации. Это обстоятельство затрудняет проведение натурных экспериментов, так как требует дополнительных исследований динамики процесса.
Целью работы является выявление наиболее приемлемого способа динамического нагружения асинхронного электродвигателя и проверка его на имитационных моделях и в реальных условиях.
Материалы и методы исследования
В этой ситуации компьютерное моделирование рассматриваемых процессов позволяет выбрать и оценить величины параметров, частоты, времени переходного процесса, биений и т.п. Поэтому нами предлагается модель, настроенная на компьютерный эксперимент, позволяющий снять параметры процесса генераторного режима при активной нагрузке.
Переключение питания электродвигателя от частотного преобразователя к сети [4] в момент максимальной скорости производится путем силовой коммутации, причем сеть будет работать как потребитель электрической энергии до установления двигательного режима. Скорость двигателя при этом изменяется периодически от максимального значения до минимального с частотой задания блока управления преобразователем частоты ПЧ. Данный способ сопровождается большими биениями напряжений сети и асинхронного двигателя в генераторном режиме.
Эффективным решением при схемотехнической реализации является решение с понижением частоты питания асинхронного двигателя с 50 до 25 Гц, что потребует разработки обратимого частотного преобразователя, питающегося от сети 50 Гц, или двух односторонних преобразователей с цепями коммутации, управляемых микропроцессором.
Основным недостатком переключения на сеть с напряжением 25 Гц является необратимость частотного преобразователя, поэтому для подтверждения эффективности предлагаемого метода на реальной установке была использована система «Тиристорный преобразователь-двигатель», изображенная на рис. 1.
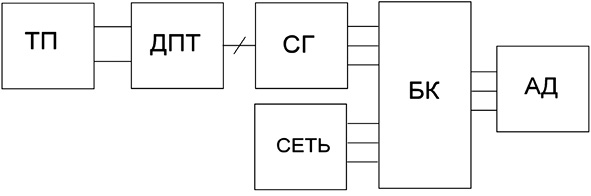
Рис. 1. Схема для поведения эксперимента:ТП – тиристорный преобразователь; ДПТ – двигатель постоянного тока; CГ – синхронный генератор; БК – блок коммутации; АД – асинхронный двигатель
При проведении данного опыта сброс частоты вращения АД происходил при помощи резкого сброса напряжения якоря ДПТ изменением выходного напряжения ТП. В схеме не используется переключение при помощи ключа. Это является необязательным, так как отдаваемая в сеть электрическая энергия не достигнет полупроводникового ТП [3], будет израсходована на трение ДПТ. По изменению напряжения статора АД можно судить об уменьшении времени переходного процесса.
Перед проведением эксперимента в реальных условиях предлагаемая модель была спроектирована в программе Matlab. Разработанная модель представлена на рис. 2.
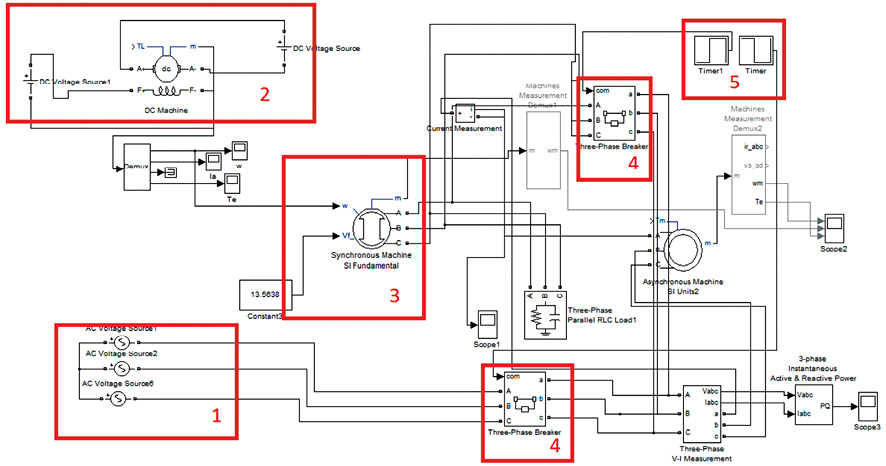
Рис. 2. Компьютерная модель с использованием синхронного генератораи приводного двигателя постоянного тока: блок 1 – трехфазная сеть; блок 2 – двигатель постоянного тока; блок 3 – синхронный генератор; блок 4 – трехфазный переключатель; блок 5 – управляющий контроллер
Блок 1 представляет собой сеть частоты 50 Гц, сеть кратной частоты 25 Гц реализована при помощи двигателя постоянного тока, изменение скорости вращения которого осуществляется изменением напряжения на якоре (блок 2), приводящего во вращение синхронный генератор (блок 3). Механическое соединение электрических машин реализовано при помощи связи по скорости, причем номинальная скорость вращения электродвигателя [6] соответствует номинальной скорости генератора. При этом уменьшение частоты питающего напряжения сети 2 привело к уменьшению скорости вращения синхронного генератора и уменьшению скорости испытуемого электродвигателя в два раза соответственно. Блок 4 представляет собой ключ, управляемый при помощи микроконтроллера 5, реализующего управляющий сигнал по времени.
В момент времени 0,6 секунд происходит переключение источников питающего напряжения с частоты 50 Гц на источник с частотой 25 Гц. Результаты изменения кривых напряжения на статоре испытуемого двигателя представлены на рис. 4.
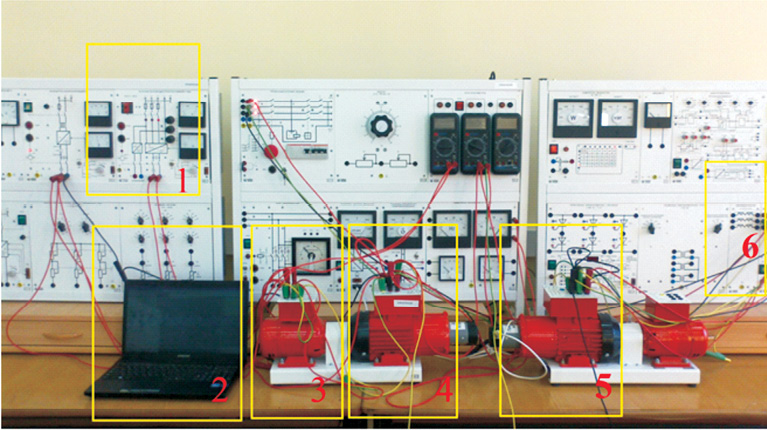
Рис. 3. Схема для проведения эксперимента в реальных условиях:блок 1 – тиристорный преобразователь; блок 2 – цифровой осциллограф; блок 3 – двигатель постоянного тока; блок 4 – синхронный генератор; блок 5 – асинхронный двигатель
Результаты исследования и их обсуждение
Из результатов моделирования на рис. 2 можно сделать вывод об уменьшении времени биений между напряжениями сети и асинхронного двигателя в генераторном режиме.
Наложение двух синусоидальных сигналов происходит на участке приблизительно от 0,6 до 0,75, что соответствует длительности переходного процесса приблизительно 0,15 с, далее по времени сигнал принимает форму синусоидально с устанавливающейся частотой 25 Гц, следовательно, предложенный метод позволяет достигнуть длительности режима приблизительно увеличенным в два раза.
Небольшое отличие в длительностях переходных процессов обусловлено неточным регулированием скорости при изменении напряжения на якоре двигателя постоянного тока.
Для поведения эксперимента в реальных условиях использовалась схема, собранная по принципу разработанной схемы рис. 1. Схема состоит из следующих блоков:
1 – Тиристорный преобразователь (ТП).
2 – Цифровой осциллограф.
3 – Двигатель постоянного тока (ДПТ).
4 – Синхронный генератор (СГ).
5 – Асинхронный двигатель (АД).
6 – Блок коммутационных элементов.
Данные, полученные при помощи цифрового осциллографа, представлены на рис. 4.
Переходный процесс занимает приблизительно 0,15 с. Кроме того, нужно учитывать, что при проведении эксперимента использовался осциллограф с делителем напряжения, что привело к уменьшению амплитуды напряжения на рисунке.
Для увеличения значения отрицательного электромагнитного момента целесообразным является нагружение двигателя в режиме генератора активным сопротивлением. Для этого в модели с использованием двигателя постоянного тока в цепь синхронного генератора включаются резистивные элементы. При подключении к синхронному генератору, выдающему напряжение с низкой частотой, асинхронный двигатель будет переходить в режим нагруженного генератора. Актуальным остается вопрос значения сопротивления нагрузки. Для этого проводился эксперимент с различными значениями нагрузочного сопротивления от 50 до 1 Ом с целью получения оптимального значения сопротивления на нагрузке, обеспечивающего максимальное время генераторного режима и максимальное значение нагрузочного электромагнитного момента.
На рис. 5 представлены результаты моделирования процесса нагружения асинхронного двигателя в генераторном режиме активным сопротивлением.
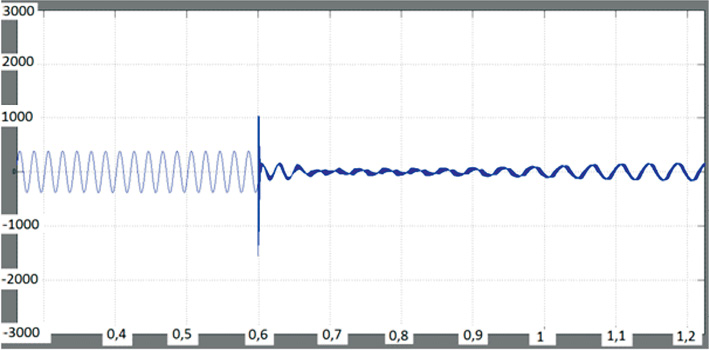
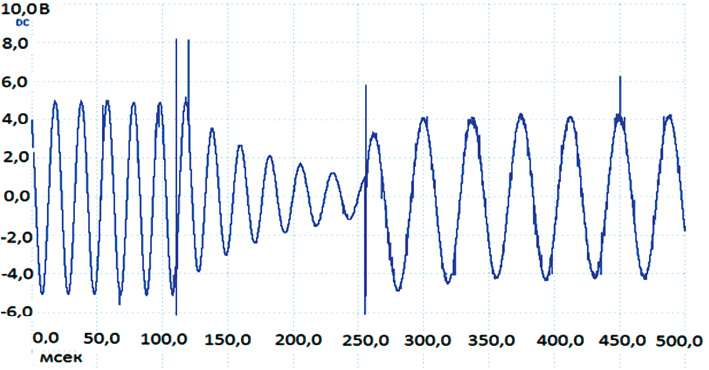
Рис. 4. Результаты проведения эксперимента
Подключение сопротивления порядка 100 Ом соответствует режиму отключения питания, резкому торможению и переходу в двигательный режим испытуемой машины, так как энергия сбрасывается в электрическую цепь.
Для определения оптимального значения на рис. 5, б приведена кривая электромагнитного момента при подключении сопротивления 50 Ом.
Рисунок является наглядным подтверждением увеличения отрицательного значения электромагнитного момента, что соответствует увеличению времени протекания генераторного режима. Из графика видно, что электромагнитный момент занимает отрицательное положение приблизительно от 0,65 до 0,77, что соответствует 0,12 с.
Полученное увеличение по времени генераторного режима испытуемого электродвигателя не является конечным результатом. Остается открытым вопрос об увеличении отрицательного значения электромагнитного момента и возможностью нагружения им испытуемого электродвигателя. Для этого подбираем сопротивление, результатом подключения которого будет максимальный электромагнитный момент и максимальное время соответствующего режима.
При использовании сопротивлений порядка 10 Ом на рис. 5, б видно ярковыраженное увеличение значения отрицательного электромагнитного момента при установленном ранее времени генераторного режима. Дальнейшее уменьшение значения сопротивления приводит к увеличение как отрицательного значения электромагнитного момента, так и положительного. На рисунке отчетливо видно, что колебания момента затрагивают и положительную зону оси абсцисс. Уменьшение вводимого сопротивления от 10 Ом и ниже влечет за собой сокращение времени процесса нагружения при малых изменениях значения результирующего электромагнитного момента.
Результаты моделирования при подключении небольшого сопротивления представлены на рис. 5, в. На графике заметны слишком большие колебания и слишком резкое сокращения времени протекания генераторного режима, поэтому результаты моделирования неприемлемы.



Рис. 5. Моделирование процесса нагружения асинхронного двигателя в генераторном режиме активным сопротивлением: а – 50 Ом; б – 10 Ом; в – 1 Ом
Из проведенных компьютерных экспериментов по увеличению времени протекания режима нагружения электромагнитным моментом асинхронного электродвигателя и по максимальному увеличению отрицательного значения электромагнитного момента можно сделать выводы о целесообразности применения нагрузочных сопротивлений в диапазоне от 10 до 5 Ом.
Выводы
Из всего вышеперечисленного можно сделать следующие выводы.
При сравнении компьютерных и натурных экспериментов можно сделать вывод об адекватностях представленных компьютерных моделей, разработанных при помощи прикладного пакета Sym Power Systems программы Matlab.
Существенное увеличение времени генераторного режима асинхронного двигателя в целях проведения испытаний электрических машин с отдачей электрической энергии возможно при использовании источников напряжения с частотой 50 Гц (сети) и 25 Гц и циклического их подключения к испытуемому электродвигателю с частотой 0.12 секунд. Такое частое переключение может быть достигнуто при помощи использования микроконтроллерного управления и полупроводниковых управляемых ключей.
Рецензенты:
Егоров А.В., д.т.н., профессор кафедры «Теоретическая электротехника и электрификация нефтяной и газовой промышленности», Российский государственный университет нефти и газа имени И.М. Губкина, г. Москва;
Ершов М.С., д.т.н., профессор, заведующий кафедрой «Теоретическая электротехника и электрификация нефтяной и газовой промышленности», Российский государственный университет нефти и газа имени И.М. Губкина, г. Москва.
Работа поступила в редакцию 29.12.2012.
Библиографическая ссылка
Марченко А.А., Портнягин Н.Н. ИССЛЕДОВАНИЕ ПРОЦЕССА ДИНАМИЧЕСКОГО НАГРУЖЕНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ // Фундаментальные исследования. 2013. № 1-2. С. 408-412;URL: https://fundamental-research.ru/ru/article/view?id=30961 (дата обращения: 18.07.2026).