



Задача управления двухзвенным манипулятором в вязкой среде по критерию минимума энергетических затрат рассматривалась в [1, 3, 5]. Возникает интерес исследовать аналогичную задачу с точки зрения существования аналитических зависимостей для моделирования оптимальных траекторий перемещения манипулятора из начального положения в заданное при минимальных энергетических затратах. Такая постановка является актуальной для автономных манипуляторов [2]. Ситуация, в которой нужно исходить из весьма ограниченной энергетики мобильных манипуляторов, является естественной, а для автономных манипуляторов и неизбежной. Тогда с точки зрения теории динамической оптимизации обтекания [4, 6] актуальна следующая задача: найти законы изменения управляющих сил и моментов, обеспечивающие перемещение манипулятора из начального положения в заданное с ограниченными энергетическими затратами.
Постановка задачи
Рассматривается механическая система, состоящая из трех материальных точек O0, O1, O2, соединенных между собой бесконечно тонкими абсолютно жесткими безынерционными стержнями с длинами r1 и r2 (рис. 1). Вся система располагается в вертикальной плоскости и может вращаться вокруг точки O0, а звено O1O2 – вокруг точки O1. Такая система моделирует транспортный манипулятор (ТМ), предназначенный для перемещения грузов. При этом точки O1, O2 соответствуют центрам инерции первого и второго звена манипулятора соответственно. Транспортируемый груз входит в состав второго звена.
Элементы ТМ связаны цилиндрическими шарнирами в точках O0, O1, в которых действуют создаваемые внутренними силами управляющие моменты U1, U2.
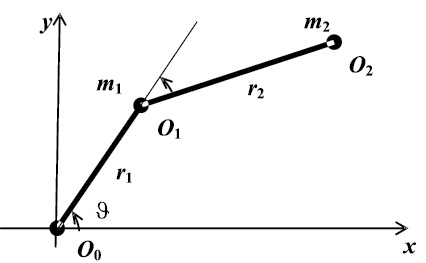
Рис. 1. Двухзвенный манипулятор
Силы тяжести m1g и m2g, силы сопротивления среды D1 и D2 и силы Архимеда приложены к первому и второму звену соответственно.
Введем следующие обобщенные координаты ТМ: φ, υ – величины, характеризующие угловое положение звеньев O0O1, O1O2 соответственно. Тогда координаты точек O1, O2 можно определить формулами:
![]()
Уравнения движения ТМ имеют вид [4]:
 (1.1)
(1.1)
где
![]()
![]()
![]()
Выражение для мощности выписывается в форме:
![]() (1.2)
(1.2)
Теперь можно поставить задачу о нахождении оптимальных управляющих моментов при перемещении ТМ из начального состояния в заданное с ограничениями на работу A(T).
Нахождение оптимальных траекторий
Введем обозначения:
![]() (2.1)
(2.1)
После решения задачи минимизации работы по перемещению манипулятора получим двухточечную краевую задачу [4]:
![]() (2.2)
(2.2)
с начальными условиями
![]() (2.3)
(2.3)
где
![]()
![]() (2.4)
(2.4)
Обозначим постоянные
![]()
Тогда ![]() В системе (2.2) постоянные c1 и c2 подбираются так, чтобы выполнялись краевые условия (2.3). Таким образом, эти постоянные являются функциями от набора значений переменных {z10, z1T, z30, z3T} в начальный и конечный моменты времени.
В системе (2.2) постоянные c1 и c2 подбираются так, чтобы выполнялись краевые условия (2.3). Таким образом, эти постоянные являются функциями от набора значений переменных {z10, z1T, z30, z3T} в начальный и конечный моменты времени.
Если переписать систему (2.1) в виде
 (2.5)
(2.5)
при тех же начальных условиях (2.3) и рассмотреть невырожденный случай, когда z3T ? z30, то возникают два варианта. В первом из них z3T ≥ z30, и в уравнении системы (2.5) выбирается знак плюс, во втором, при z3T ≤ z30, выбирается знак минус. Далее без ограничения общности можно считать, что реализуется первый вариант. С учетом соотношения (2.4) и введенных обозначений можно решить второе уравнение системы (2.5). Перепишем его в виде
![]() (2.6)
(2.6)
Отсюда получим
 (2.7)
(2.7)
Введем обозначение ![]() или
или ![]() . Тогда систему (2.2) можно записать в виде
. Тогда систему (2.2) можно записать в виде
 (2.8)
(2.8)
или
 (2.9)
(2.9)
Таким образом, фазовая траектория системы
 (2.10)
(2.10)
то есть не зависит от константы c1.
Моделирование оптимального управления
Полученная задача (2.8), (2.9) решается численно. Моделирование экстремальных программ позволит качественно оценить поведение исследованной системы [7]. Находятся оптимальные значения параметров c1k, которые определяют оптимальное движение манипулятора в соответствии с уравнениями (2.5). Само оптимальное управление определяется соотношениями (1.1).
При численном решении задачи нужно учитывать, что функции f1(z3, c1, k), f2(z3, c1, k) должны быть определены и действительны на интервале [z30, z3T], что дает дополнительные ограничения на постоянные.
На рис. 2 показано оптимальное движение двухзвенного манипулятора при следующих исходных данных:
![]()
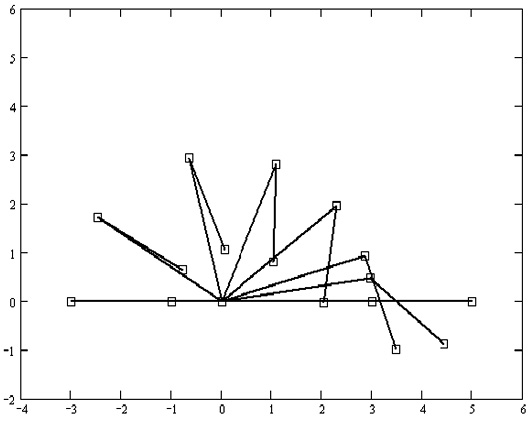
Рис. 2. Оптимальные перемещения ТМ (m1 = 0,1; m1 = 1,0 )
На рис. 3 показано оптимальное движение двухзвенного манипулятора при других исходных данных, масса второго звена меньше массы первого.
В результате решена задача построения оптимальных программ перевода транспортного манипулятора из начального положения в заданное при ограничениях на затраченную работу.
Исследования выполнены при финансовой поддержке РФФИ, проект № 10-01-00356 и в рамках программы фундаментальных исследований Президиума РАН «Математические модели и алгоритмы в управляемых системах с нелинейной динамикой» при поддержке УрО РАН, проект № 12-П-1-1012/1.
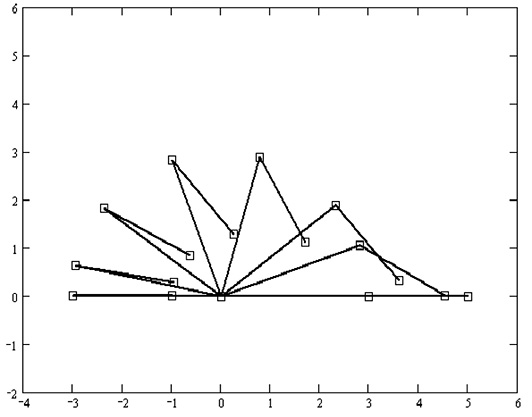
Рис. 3. Оптимальные перемещения ТМ (m1 = 0,1; m1 = 1,0 )
Рецензенты:
Тимофеева Г.А., д.ф.-м.н., профессор, зав. кафедрой, УрГУПС, г. Екатеринбург;
Сесекин А.Н., д.ф.-м.н., профессор, в.н.с., ИММ УрО РАН, г. Екатеринбург;
Попов Ф.А., д.т.н., профессор, зам. директора по информационным технологиям, Бийский технологический институт (филиал) ГОУ ВПО «Алтайский государственный технический университет им. И.И. Ползунова», г. Бийск.
Работа поступила в редакцию 13.11.2012.
Библиографическая ссылка
Завалищин Д.С., Завалищин Д.С. АНАЛИТИЧЕСКОЕ И КОМПЬЮТЕРНОЕ МОДЕЛИРОВАНИЕ ПЕРЕМЕЩЕНИЙ ДВУХЗВЕННОГО МАНИПУЛЯТОРА // Фундаментальные исследования. 2012. № 11-5. С. 1224-1227;URL: https://fundamental-research.ru/ru/article/view?id=30739 (дата обращения: 02.06.2026).