



Механическое воздействие движителей на почву не может рассматриваться только как уплотняющее, так как одновременно с этим происходит интенсивное разрушение структуры почвы под влиянием буксования.
Для предотвращения негативных последствий механического воздействия движителей на почву анализируются причины переуплотнения почв движителями, разрабатываются методы борьбы с этим явлением и мероприятия, позволяющие ограничить (или снизить) механическое воздействие.
Можно выделить три главных направления решения этой проблемы.
1. Технологическое, заключающееся в разработке рациональных маршрутов движения машин, устройстве постоянных полос для проезда техники, использовании перегрузочной технологии при взаимодействии с транспортными средствами и др. Эти меры широко используются в отечественной практике в последние годы (индустриальные технологии).
2. Агрономическое (касается почв, являющихся сельскохозяйственными угодьями), заключающееся в повышении способности почвы противостоять уплотняющим и сдвигающим нагрузкам и соблюдению качественных показателей при обработке почвы, введении дополнительных операций разуплотнения.
3. Конструкторское, заключающееся в совершенствовании техники и ее движителей, способствующих устранению или снижению негативных воздействий на почву. Благодаря этому направлению почву можно предохранить от переуплотнения, что приведет к сохранению ее потенциального и эффективного плодородия и позволит избежать также излишних затрат энергии на почвообработку, которые в настоящее время весьма значительны.
Конструкторское направление является эффективным средством решения проблемы, поскольку относительно легче (и дешевле) предотвратить механическое воздействие движителей на почву, чем затем устранять его последствия. Особенно актуально это направление для северных районов России, характеризующихся бездорожьем, большой удалённостью от экономических центров, наличием отдельно расположенных и удалённых на сотни и тысячи километров друг от друга очагов промышленно-индустриального освоения, многообразной структурой и небольшими размерами сельскохозяйственного производства. Экстремальные природно-климатические условия и особая острота экологической проблемы, обусловливаются интенсивным антропогенным и техногенным воздействием на уникальный природный комплекс тундры, который сильно уязвим и практически не способен к самовосстановлению.
С целью уменьшения воздействия движителей на почвенно-растительный покров и расширения возможности поворота колеса во всех направлениях нами был разработан способ перемещения транспортного средства [1].
Предлагаемый способ включает подачу крутящего момента на колесо (шароколесо), которое передаёт вращение на обод, связанный с колесом. Обод вместе с осью и приводным колесом поворачивают относительно внутренней сферической поверхности колеса и фиксируют в направлении дальнейшего движения колеса. Положение оси колеса задают относительно внутренней поверхности колеса задающими элементами. Устройство транспортного средства содержит колесо, внутри которого установлено приводное колесо, взаимодействующее с ободом, связанным с внутренней сферической поверхностью колеса. На конце оси, на которой на водиле установлено приводное колесо [2], взаимодействующее с ободом, выполнены задающие элементы, которые выполнены с возможностью взаимодействия с внутренней сферической поверхностью колеса, а обод выполнен с возможностью поворота и фиксации относительно внутренней сферической поверхности колеса. В результате движения транспортного средства в соответствии с разработанным способом достигается возможность поворота колеса во всех направлениях с минимальным сопротивлением практически без разрушения почвы.
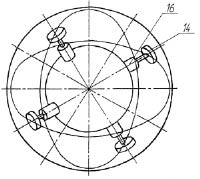
Колесо (шароколесо) 1 (рис. 1) имеет внутреннюю 2 и внешнюю 3 поверхности, причём колесо 1 может быть выполнено как из прозрачного, так и непрозрачного материала. Внутри колеса 1 установлен обод 4, который может быть выполнен зубчатым. Обод 4 с внешней стороны имеет сферическую поверхность 5, которая взаимодействует с внутренней 2 поверхностью колеса 1 (см. рис. 1), причём обод 4 может фиксироваться относительно внутренней поверхности колеса 1 фиксирующим элементом 6. С ободом 4 взаимодействует приводное колесо 7, которое может быть выполнено зубчатым и установлено на оси 8 посредством водила 9, состоящего из щёк 10, 11. Обод 4 имеет щёки 12, 13, в которых выполнены отверстия для установки оси 8, причём на концах оси 8 установлены задающие элементы 14. хотя бы в одном из которых установлено устройство поворота 15 оси 8 с приводным механизмом 16. Задающий элемент 14 может быть выполнен с различной поверхностью или в виде одного или двух роликов 17, упруго установленных для задания положения оси 8 внутри сферического колеса 1. В процессе движения приводное колесо может отклоняться относительно нижнего положения на угол α (рис. 2), причём отклонение ограничено упругими элементами 18, связанными с осью 8. Задающий элемент 14 может взаимодействовать с направляющей 19 (рис. 3). Задающие элементы 14 описывают сферические траектории (рис. 4, а, б). Приводное колесо 7 приводится во вращение приводом 20 (электродвигатель или другой двигатель) (рис. 1, 3). Колесо 1 может быть установлено в корпусе 21 шарнирно с помощью элементов 22. На рис. 5, а, б показаны варианты с одним и двумя колёсами 1, установленными в корпусе 21. Причём каждое колесо может работать автономно, когда все приводные элементы (условно не показанные) расположены внутри колеса 1. В этом случае колесо 1 поворачивается в любом направлении на 360º. Если приводные механизмы расположены внутри колеса, а источник энергии 23, например, на корпусе 21, то энергия подводится через (провод и т.д.) отверстия 24 в колёсах 1. Если приводные механизмы и источники энергии расположены на корпусе, то через отверстия 24 проходят механические системы (карданные или гибкие валы). В этих случаях угол поворота колёс ограничен и составляет около 360º
(см. рис. 1, 2).
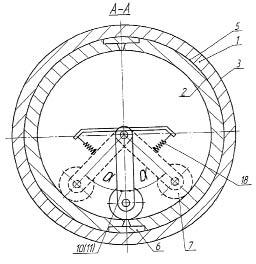
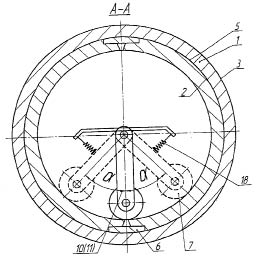
Рис. 1. Общий вид колеса (шароколеса) с приводом и поворотным устройством
(мотор-шароколесо)
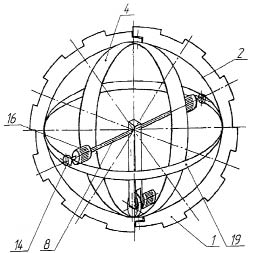
Рис. 2. Принципиальная схема колеса (шароколеса)
а б
Рис. 3. Схема движения задающих элементов в пространстве:
а, б - соответственно с и без приводных механизмов
Работа при осуществлении данного способа происходит следующим образом. Подается крутящий момент на приводное колесо 7, которое передает вращение на обод 4 колеса 1, причем обод 4 относительно колес 1 фиксируется в направлении дальнейшего движения колеса фиксирующим механизмом 6 с внутренней поверхности 2 колеса 1, а внутренняя 2 и внешняя 3 поверхности колеса (шароколеса) 1 выполнены сферическими. Положение оси колеса задается относительно внутренней 2 поверхности колеса 1 задающими элементами 14, которые могут иметь различную поверхность, взаимодействующую с внутренней сферической поверхностью колеса или в виде роликов с каждой стороны оси колеса или двух роликов с упругим элементом.
Задающие элементы 14 могут взаимодействовать как непосредственно с внутренней поверхностью 2 колеса 1, так и с направляющей 19. Задающие элементы 14 могут приводиться во вращение приводным механизмом относительно оси (в этом случае задающие элементы могут вращаться относительно оси) и выполнять функции устройства поворота или непосредственно устройством 15 приводным механизмом 16 или от внешнего источника поворота через отверстие 24. Задающие элементы 14 описывают сферические траектории (см. рис. 4, а, б).
а б
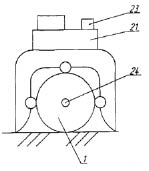
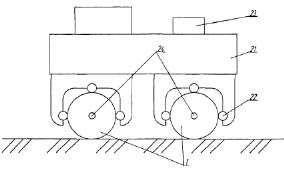
Рис. 4. Установка мотор-шароколесо на транспортное средство:
а и б - соответственно устройство с одним или двумя шароколесами
Приводное колесо 7 и обод могут выполняться из различных материалов с покрытиями для повышения трения и т.д. или выполняться зубчатыми. Приводное колесо 7 приводится во вращение приводом 20 (включающим электродвигатель и т.д.) или от внешнего источника энергии 21. Хотя бы одно колесо 1 может быть установлено в корпусе (см. рис. 5, а) или два и более колес располагают в корпусе (см. рис. 5, б). В этом случае перевозимый объект (груз, водитель, пассажиры) может располагаться не внутри колеса, а на корпусе.
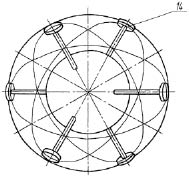
а б
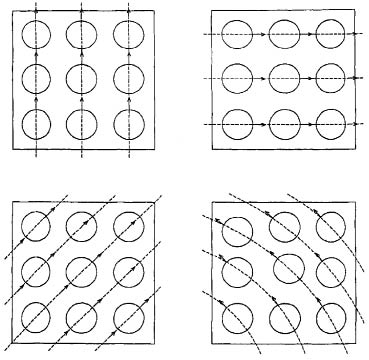
в г
Рис. 5. Транспортное средство на базе нескольких мотор-шароколес:
а, б, в, г - траектории возможных перемещений транспортного средства
Приводное колесо 7 (см. рис. 1) при большом внешнем сопротивлении может отклоняться на угол α до упора в упругие элементы 18 (возможно сжатие упругих элементов), приводное колесо 7 установлено относительно оси 8 посредством 10, 11 водила 9. Колесо 1 устанавливается в корпусе от одного и больше. Для движения с наименьшим сопротивлением колёса приводят во вращение по касательной к траектории 9 (рис. 4, а, б, в, г) в частном случае, если траектория прямая линия в направлении траектории. То есть движение может осуществляться в любом направлении (см. рис. 4, а, б, в). Если необходимо повысить сопротивление движению, колёса приводят во вращение в направлении, не совпадающем с касательной к траектории (с траекторией).
Транспортное средство может использоваться во вредных для здоровья людей зонах (радиоактивная, для взрывных работ и т.д.), люди внутри колеса или на (в) корпусе в этом случае не размещаются.
Предлагаемое конструктивное выполнение по разработанному способу [1] позволит расширить возможности поворота транспортного средства в любом направлении по любой траектории.
Применённый в транспортном средстве движитель, выполненный с использованием нескольких объединённых в группы по приводу сферических колёс (шароходов), придаёт ему уникальные возможности по маневренности (см. рис. 5).
Эти возможности в полной мере реализуются в роботизированном устройстве, оснащенном системой управления, позволяющей отрабатывать сложные алгоритмы одновременного (синхронного) управления несколькими регулируемыми приводами.
Роботизированное транспортное средство за счет системы приводов может выполнять как простые перемещения (вперёд, назад, вправо, влево) по прямолинейным траекториям без каких-либо дополнительных маневров (поворотов, разворотов) по кратчайшей траектории, так и очень сложные движения и перемещения. Например, при условном движении вперёд устройство способно мгновенно (если не учитывать инерцию) изменить направление траектории на движение вправо или влево. Как один из сравнительно простых вариантов движения может быть выполнено вращение вокруг средней точки. В качестве примеров более сложных траекторий можно привести следующее:движение по кривой с сохранением ориентации в глобальной системе координат; движение по кривой с обеспечением ориентации относительно кривой (например, с сохранением положения по касательной к линии в точке положения); движение по окружности;движение по прямой или кривой с одновременным вращением.
Возможно использование разработок при обслуживании, ремонте и обеспечении промышленной безопасности при сооружении газонефтепроводов в качестве транспортных машин, машин для транспортировки труб и плетей, бурового оборудования особенно в труднодоступных местах при работе на грунтах с малой несущей способностью, при вынужденной прокладке трубопроводов через сельскохозяйственные угодья с целью снижения вредного воздействия движителей на почву.
Список литературы
- Лапынин Ю.Г., Макаренко А.Н., Резников Д.В. Волновой способ движения транспортно-тяговых устройств // Успехи современного естествознания. - 2007. - №8. - C. 87.
- Лапынин Ю.Г., Карева Н.В., Величкин Н.А. Многоопорная шагающая машина//Успехи современного естествознания. - 2005. - №8. - C. 41-42.
- Лапынин Ю.Г., Фомин С.Д, Карева Н.В. Экологические проблемы воздействия ходовых систем колесных машин на почву // Инженер, технолог, рабочий. - 2004. - №12. - С. 20-23.
- Лапынин Ю.Г., Карева Н.В., Лапынина Н.Ю. Улучшенные эксплуатационные качества мобильной машины // Успехи современного естествознания. - 2005. - №11. - C. 87.
- Патент РФ №2375234, МПК 7 B62D57/00, B60B19/14 Способ перемещения транспортного средства и устройство его реализующее / Лапынин Ю.Г., Хавронина В.Н., Макаренко А.Н. // Б.И. - 2009. -№34.
Рецензенты:
Рябов И.М., д.т.н., профессор кафедры АП ГОУ ВПО «Волгоградский государственный технический университет», Волгоград;
Новиков В.В., д.т.н., профессор кафедры АУ ГОУ ВПО «Волгоградский государственный технический университет», Волгоград.
Библиографическая ссылка
Лапынин Ю.Г, Макаренко А.Н, Архипов А.А, Резников Д.В ПУТИ УВЕЛИЧЕНИЯ ПРОХОДИМОСТИ И ЭКОЛОГИЧНОСТИ ТРАНСПОРТНЫХ СРЕДСТВ // Фундаментальные исследования. 2011. № 4. С. 101-107;URL: https://fundamental-research.ru/ru/article/view?id=21238 (дата обращения: 11.07.2026).