



Одним из направлений повышения безопасности полёта самолётов с турбореактивными двухконтурными двигателями (ТРДД) в свете развития российской системы технического регулирования является подтверждение соответствия качества ТРДД требованиям Авиационных правил Межгосударственного авиационного комитета и нормативов ICAO. В то же время тенденции развития методов контроля и компенсации «разнотяговости» и асимметрии тяги отечественных ТРДД диктуются требованиями соответствия их качества достижениям зарубежных двигателестроительных фирм «Pratt&Whitney» и «Rolls-Royce». Однако на пассажирских самолётах с ТРДД даже зарубежного производства, например, фирмы «Boeing», реализуемые в системах автоматического управления (САУ) их силовыми установками программы управления работают выборочно и статистические выборки управляющих факторов анализируются в двумерной постановке задачи компенсации «разнотяговости» и асимметрии тяги ТРДД в двумерной системе координат («вероятность проявления разных диапазонов статистической выборки управляющего фактора – замеряемые значения этого фактора») [1].
Метод минимизации «разнотяговости» и асимметрии тяги ТРДД в трёхмерной постановке задачи компенсации их «разнотяговости» и асимметрии тяги позволяет анализировать управляющие факторы в системе координат («вероятность проявления разных диапазонов статистических выборок двух управляющих факторов – замеряемые значения одного фактора – замеряемые значения второго фактора») [2]. Такова же постановка решаемой в данной статье задачи минимизации «разнотяговости» и асимметрии тяги ТРДД. Несмотря на достоинства известных методов контроля и компенсации «разнотяговости» и асимметрии тяги ТРДД, поставленная задача такими методами не решалась.
Цель данной статьи – предложить решение этой задачи для обеспечения ввода через САУ силовой установкой самолёта с двумя ТРДД особых поправок (малых отклонений) сразу двух управляющих факторов для повышения безопасности его полёта, если оба ТРДД прошли на заводе-изготовителе глубокое тестирование их технического состояния после испытаний на заводских горячих стендах в условиях серийного производства и выходной контроль с ужесточёнными условиями заводской приёмки. Особенностью этого решения является применение нормированной двумерной случайной функции, распределённой по нормальному закону, при глубоком тестировании технического состояния ТРДД после их испытаний на заводских горячих стендах в условиях серийного производства [3–4].
Известно, что «разнотяговость» и асимметрия тяги двух газотурбинных двигателей (ГТД) силовой установки самолёта во время взлёта и набора высоты при потере тяги одного из ГТД компенсируется, как правило, повышением тяги другого ГТД [5]. Их «разнотяговость» и асимметрию тяги контролирует и компенсирует САУ этой силовой установкой, реализующая выборочно одну из заложенных в ней программ управления тягой. Однако к недостаткам тех известных способов управления силовой установкой самолёта с двумя ГТД, которые уже реализовывались и (или) ещё реализуются в САУ силовыми установками самолётов с двумя ТРДД, следует отнести негативные последствия включения режима повышенной тяги (РПТ), заключающиеся в ускоренной выработке ресурса ГТД в случаях, когда это не требуется по условиям полёта, например в начале разбега самолёта по взлётно-посадочной полосе или при наборе им высоты. А в случае неисправности ГТД на взлёте при попадании в него посторонних предметов (птиц, градин, баллистических объектов) и вызываемых ими механических повреждений турбины или механического разрушения её рабочих лопаток из-за коррозионного действия газов и эрозии мелкими посторонними частицами (песком) или перегреве ГТД из-за чрезмерно длительных или частых включений РПТ в условиях высоких температур воздуха, увеличение предельных (установочных) значений регулируемых параметров и режима работы неисправного ГТД может привести к его окончательной поломке и нелокализованному отказу. Тогда «разнотяговость» и асимметрия тяги двух ГТД силовой установки самолёта может привести к нежелательному разворачивающему моменту действующих на него сил, что чревато катастрофой. Но если ГТД успешно прошли на заводе-изготовителе глубокое тестирование их технического состояния после испытаний на заводских горячих стендах в условиях серийного производства и выходной контроль с ужесточёнными вдвое условиями заводской приёмки, то асимметрию тяги таких ГТД в полёте можно скомпенсировать при помощи САУ силовой установкой самолёта, если использовать в ней одновременно два параметра тяги.
Известный способ управления силовой установкой самолёта с двумя ГТД
Известен новый способ управления силовыми установками самолёта с двумя ГТД при отказе или частичной потере тяги одного из них, согласно которому автоматически осуществляется определение потери тяги неисправного ГТД и исключение недопустимых включений РПТ в условиях взлёта самолёта и набора высоты [5]. Потеря тяги в полёте на режиме «Взлёт» определяется по уменьшению частоты вращения вентилятора nв и её 1-ой производной dnв/dt ниже заданных величин, а автоматическое повышение тяги исправного ГТД осуществляется при значении положения рычага управления двигателем (РУД) αРУД больше заданного значения положения РУД αРУДзад (αРУД > αРУДзад) и наличии сигнала «Стояночный тормоз самолёта выключен» IТ. Управление силовой установкой самолёта этим способом включает измерение значений параметра тяги двух двигателей, сравнение измеренных значений этого параметра тяги с его заданным значением, необходимым для включения РПТ, измерение значения положения РУД αРУД для каждого двигателя, сравнение измеренного значения положения РУД αРУД каждого двигателя с заданным значением положения РУД αРУДзад, соответствующим взлётному режиму самолёта, включение РПТ исправного двигателя при отказе или частичной потере тяги другого двигателя, измерение величины воздушной скорости самолёта Vc, сравнение измеренной величины воздушной скорости самолёта Vc с заданной величиной воздушной скорости самолёта Vcзад, формирование сигналов «Предкрылки не убраны» IП и «Стояночный тормоз самолёта выключен» IТ, а РПТ исправного ГТД включается при достижении величины воздушной скорости самолёта Vc больше заданной величины воздушной скорости самолёта Vcзад (Vс > Vсзад) и наличии сигналов «Предкрылки не убраны» IП и «Стояночный тормоз самолёта выключен» IТ. Наличие сигнала «Предкрылки не убраны» IТ свидетельствует о нахождении механизации крыла во взлётной конфигурации, а в качестве заданной величины воздушной скорости самолёта Vcзад используется заданная величина скорости принятия решения о взлёте Vвзлзад (Vcзад = Vвзлзад), так как она характеризует скорость разбега самолёта, на которой возможно безопасное продолжение или прекращение взлёта. По окончании взлёта самолёта происходит переход механизации крыла из взлётной конфигурации в полётную, при этом сигнал «Предкрылки не убраны» IТ снимается, и в дальнейшем РПТ в полёте не включится. Сигнал «Стояночный тормоз самолёта выключен» IП поступает от датчика включения/выключения стояночного тормоза после того, как экипаж выключит стояночный тормоз перед началом разбега самолёта по взлётно-посадочной полосе и не снимается практически до конца полёта. Снятие РПТ осуществляется только пилотом путём перевода РУД на пониженный режим, если измеренное значение положения РУД αРУД меньше заданного значения положения РУД αРУДзад (αРУД < αРУДзад).
К недостаткам прототипа следует отнести негативные последствия управления силовой установкой самолёта с двумя ГТД путём введения поправок (взвешенных значений 1-ой производной частоты вращения вентилятора δnв = Св·dnв/dt, где коэффициент Св зависит от динамических свойств вентилятора) всего лишь одного контролируемого рабочего параметра ГТД (частоты вращения вентилятора nв), задействованного в качестве параметра тяги без учёта его взаимосвязи с другим контролируемым рабочим параметром тех же двигателей, который также может быть задействован в качестве параметра тяги. Следовательно, основным недостатком прототипа является недооценка функциональной связи и взаимного влияния на уровень тяги в полёте тех контролируемых рабочих параметров ГТД, которые могут быть задействованы в качестве параметров тяги, поскольку для управления силовой установкой самолёта с двумя ГТД при отказе или частичной потере тяги одного из них в условиях взлёта самолёта и набора высоты предусмотрено использование всего лишь одной-единственной программы управления тягой ГТД в полёте (nв ± δnв = const), а выборки контролируемых значений частоты вращения вентилятора nв анализируются только в двумерной постановке задачи компенсации асимметрии тяги двух ГТД, то есть в двумерной системе координат: (Pв-nв), где Pв – вероятность проявления различных диапазонов выборки контролируемых значений частоты вращения вентилятора nв. А реализация этого способа управления даже в САУ силовой установкой самолёта с такими ГТД, как, например, ТРДД, приводит к тому, что программы управления по частоте вращения ротора низкого давления (РНД) n1 ± δn1 = const и частоте вращения ротора компрессора (КВД) n2 ± δn2 = const работают выборочно, а выборки значений управляющих факторов n1 и n2, которые могут быть задействованы в качестве параметров тяги, анализируются в двумерной постановке задачи компенсации «разнотяговости» и асимметрии тяги ТРДД в двумерных системах координат (PI-n1) и (PII-n2), где PI и PII – вероятности проявления разных диапазонов выборки одного управляющего фактора.
Однако анализ выборок контролируемых значений сразу двух параметров тяги силовой установки самолёта с ТРДД в трёхмерной постановке задачи компенсации их «разнотяговости» и асимметрии тяги позволяет минимизировать их «разнотяговость» [2, 4]. если в САУ силовой установки самолёта с теми ТРДД, которые успешно прошли на заводе-изготовителе глубокое тестирование их технического состояния после испытаний на заводских горячих стендах в условиях серийного производства и выходной контроль с ужесточёнными вдвое условиями заводской приёмки, реализовать одновременно программы управления n1 ± δn1 = const и n2 ± δn2 = const для минимизации «разнотяговости» этих ТРДД в трёхмерной постановке задачи компенсации их «разнотяговости» и асимметрии тяги, то потерю тяги (отказ ТРДД) можно и должно определять по уменьшению контролируемых значений параметров тяги n1 и n2 ниже их заданных значений n1зад и n2зад соответственно.
Структурная схема предлагаемой САУ силовой установкой самолёта с ТРДД
Ряд зарубежных и отечественных самолётов оснащен такими САУ их силовыми установками, которые обеспечивают в полёте компенсацию асимметрии тяги ТРДД путём введения поправок одного управляющего фактора, для чего выборочно применяются программы управления n1 ± δn1 = const (аэробус А-310 фирмы «General Electric») и n2 ± δn2 = const (аэробус ИЛ-96-300 ОАО «Авиационный комплекс имени С.В. Ильюшина»). Однако, программа управления n2 ± δn2 = const обладает худшей экономичностью в полёте по сравнению с программой управления n1 ± δn1 = const [2–4]. Задействовав их одновременно в САУ силовой установкой самолёта с двумя ТРДД, которые после глубокого тестирования их технического состояния на заводе-изготовителе успешно прошли выходной контроль с ужесточёнными условиями заводской приёмки, можно повысить экономичность этих программ управления при компенсации «разнотяговости» и асимметрии тяги таких ТРДД в полёте для повышения его безопасности. Тогда потерю тяги следует определять по уменьшению значений управляющих факторов n1 и n2 ниже их заданных значений n1зад и n2зад. Сравнение соответствующих значений сразу двух управляющих факторов позволяет оценивать необходимость включения РПТ одного из этих ТРДД при потере тяги другого ТРДД, например, в условиях взлёта и набора высоты. Структурная схема предлагаемой САУ силовой установкой самолёта, реализующая одновременно две программы управления при асимметрии тяги двух его ТРДД в полёте, представлена на рис. 1.
В предлагаемой САУ силовой установкой самолёта управляющие факторы n1 и n2 применяются в качестве параметров тяги и управление ТРДД обеспечивается блоками управления по сигналам от датчиков положения РУД αРУД и датчиков частот вращения роторов n1 и n2, а суммарные сигналы частоты вращения РНД n1 и её 1-ой производной dn1/dt в виде n1 ± С1·dn1/dt и частоты вращения ротора КВД n2 и её 1-ой производной dn2/dt в виде n2 ± С2·dn2/dt служат для диагностики «разнотяговости» и асимметрии тяги ТРДД в условиях взлёта и набора высоты, при условии, что весовые коэффициенты С1 и С2 в поправках δn1 = С1·dn1/dt и δn2 = С2·dn2/dt зависят от динамических свойств роторов.
О нахождении механизации крыла во взлётной конфигурации свидетельствует наличие сигнала «Предкрылки не убраны» IТ. По окончании взлёта происходит переход механизации крыла в полётную конфигурацию и сигнал «Предкрылки не убраны» IТ снимается, что исключает включение РПТ в полёте. О выключении стояночного тормоза самолёта перед началом разбега по взлётно-посадочной полосе свидетельствует сигнал «Стояночный тормоз самолёта выключен» IП, который не снимается до конца полёта. Снятие РПТ выполняется изменением положения РУД, если его значение αРУД ниже заданного значения αРУДзад.
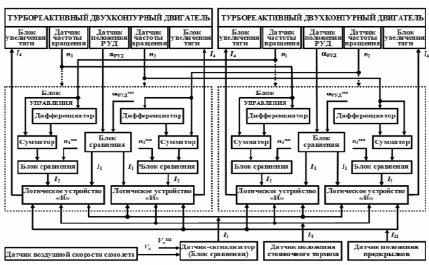
Рис. 1. Структурная схема предлагаемой САУ силовой установкой самолёта с ТРДД
Выходные сигналы датчиков частоты вращения РНД n1 и датчиков частоты вращения ротора КВД n2 одновременно подаются на блоки управления ТРДД, где в блоках сравнения значений положения РУД осуществляется сравнение измеренных значений положения РУД αРУД с его заданным значением αРУДзад, соответствующим режиму полёта. При αРУД > αРУДзад на выходе этих блоков формируются логические сигналы «РУД на режиме “Взлёт”» I1 = 1. В дифференциаторах каждого ТРДД осуществляются вычисления 1-ой производной частоты вращения РНД dn1/dt и 1-ой производной частоты вращения ротора КВД dn2/dt соседнего ТРДД. Сумматоры каждого ТРДД осуществляют алгебраическое суммирование поступающих с датчиков частоты вращения РНД n1 и датчиков частоты вращения ротора КВД n2 соседнего ТРДД сигналов, пропорциональных его частоте вращения РНД n1 и её 1-ой производной dn1/dt, и сигналов, пропорциональных его частоте вращения ротора КВД n2 и её 1-ой производной dn2/dt. В соответствующих этим сумматорам блоках сравнения осуществляется сравнение суммарного сигнала частоты вращения РНД n1 и её 1-ой производной dn1/dt и суммарного сигнала частоты вращения ротора КВД n2 и её 1-ой производной dn2/dt с заданными значениями частоты вращения РНД n1зад и частоты вращения ротора КВД n2зад соответственно. Логические сигналы «Провал режима двигателя ниже допустимого» I2 = 1 формируются на выходах блоков сравнения при n1 < n1зад и (или) n2 < n2зад. Датчик воздушной скорости самолёта фиксирует величину воздушной скорости самолёта Vc и подаёт сигнал на датчик-сигнализатор, в котором осуществляется сравнение измеренной величины воздушной скорости самолёта Vc с заданной её величиной Vcзад.
В качестве заданной величины воздушной скорости самолёта Vcзад используется заданная величина скорости принятия решения о взлёте Vвзлзад (Vcзад = Vвзлзад), поскольку она характеризует скорость разбега самолёта, на которой возможно безопасное прекращение и безопасное продолжение взлёта. При Vс > Vсзад дискретный сигнал «Скорость принятия решения» I3 = 1 поступает на входы логических устройств «И», работающих по схеме «И».
Кроме логических сигналов «РУД на режиме “Взлёт”» I1 и «Провал режима двигателя ниже допустимого» I2, поступающего с соседнего ТРДД, на вход логического устройства «И» в зависимости от этапа полёта поступают дискретные сигналы «Стояночный тормоз самолёта выключен» IТ = 1 с датчика положения стояночного тормоза и «Предкрылки не убраны» IП = 1 с датчика положения предкрылков. Сформированные логическими устройствами «И» управляющие сигналы I4 = 1 поступают на исполнительные органы (блоки увеличения тяги), которые обеспечивают увеличение тяговых характеристик ТРДД.
Работа предлагаемой САУ силовой установкой самолёта с двумя ТРДД
Предлагаемая САУ силовой установкой самолёта с двумя ТРДД при компенсации асимметрии их тяги во время взлёта самолёта и набора высоты в случае неисправности (отказа) или частичной потери тяги одного из его ТРДД работает следующим образом.
На исполнительном старте перед началом разбега самолёта по взлётно-посадочной полосе, когда величина воздушной скорости самолёта Vc = 0, ТРДД работают на режиме «Малый газ». На входы блоков управления с датчика положения предкрылков поступает дискретный сигнал «Предкрылки не убраны» IП = 1, свидетельствующий о необходимой для взлёта конфигурации крыла. После перемещения обоих РУД на режим «Взлёт» на выходе блоков сравнения значений положения РУД формируются логические сигналы «РУД на режиме “Взлёт”» I1 = 1. После увеличения тяги обоих ТРДД экипаж выключает стояночный тормоз, начинается разбег самолёта и датчик положения стояночного тормоза формирует сигнал «Стояночный тормоз самолёта выключен» IТ = 1, который поступает на входы логических блоков «И». При Vс > Vcзад на выходе датчика-сигнализатора формируется сигнал «Скорость принятия решения» I3 = 1, поступающий на входы логических блоков «И». В случае потери тяги одного ТРДД, которое характеризуется снижением значения суммарного сигнала частоты вращения РНД n1 и её 1-ой производной dn1/dt ниже заданного значения частоты вращения РНД n1зад, на выходе блока сравнения значений частоты вращения РНД n1 другого ТРДД формируется логический сигнал «Провал режима двигателя ниже допустимого» I2 = 1, поступающий на вход соответствующего логического блока «И».
При отказе или частичной потере тяги того же или другого ТРДД и соответствующем снижении значения суммарного сигнала частоты вращения ротора КВД n2 и её 1-ой производной dn2/dt ниже заданного значения этой частоты n2зад, на выходе блока сравнения частоты вращения ротора КВД n2 блока управления соседнего ТРДД формируется логический сигнал «Провал режима двигателя ниже допустимого» I2 = 1, поступающий на вход логического блока «И» этого блока управления. При поступлении сигналов «РУД на режиме “Взлёт”» I1 = 1, «Провал режима двигателя ниже допустимого» I2 = 1, «Скорость принятия решения» I3 = 1, «Стояночный тормоз самолёта выключен» IТ = 1 и «Предкрылки не убраны» IП = 1 на входы какого-либо логического блока «И», на его выходе формируется логический сигнал «Включение РПТ» I4 = 1, поступающий в случае неисправности одного ТРДД на соответствующий этому логическому блоку «И» исполнительный орган (блок увеличения тяги) другого (исправного) ТРДД для увеличения его тяговых характеристик.
Результатом решения поставленной задачи стала формализация принципа работы САУ силовой установкой самолёта с двумя ТРДД, успешно прошедшими глубокое тестирование их технического состояния после испытаний на заводских горячих стендах и выходной контроль на заводе-изготовителе по результатам такого тестирования. Она позволяет описать её работу при асимметрии тяги из-за неисправности (отказа) одного из этих ТРДД в полёте алгоритмом управления параметрами тяги n1 и n2, когда одновременно задействованы программы управления n1 + δn1 = const и n2 + δn2 = const.
Весовые коэффициенты С1 ≤1 и С2 ≤ 1 для одного ТРДД (ТРДД 1) с параметрами тяги n1 и n2, а также соответствующие весовые коэффициенты С1* ≤ 1 и С2* ≤ 1 для другого ТРДД (ТРДД 2) с параметрами тяги n1* и n2* при таких соотношениях измеренных на заводе-изготовителе значений (тестовых значений) n1тест, n2тест, n1тест* и n2тест* этих параметров, как n1мин ≤ n1тест < (n1макс + n1мин)/2, n2мин ≤ n2тест < (n2макс + n2мин)/2, n1мин ≤ n1тест* < (n1макс + n1мин)/2 и n2мин ≤ n2тест* < (n2макс + n2мин)/2, необходимы для предотвращения ложных срабатываний предлагаемой САУ силовой установкой самолёта и повышения асимметрии тяги его ТРДД при n1 + С1·dn1/dt < n1зад или n1* + С1*·dn1*/dt < n1зад, или n2 + С2·dn2/dt < n2зад, или n2* + С2*·dn2*/dt < n2зад из-за исходной «разнотяговости» двух таких ТРДД вследствие неравенства тестовых значений частот вращения их роторов n1тест, n1тест*, n2тест, n2тест* и заданных значений тех же частот вращения n1зад = (n1макс + n1мин)/2-[(n1макс + n1мин)/2-n1тест] = n1тест при значениях n1мин ≤ n1тест < n1тест* ≤ n1макс или n1зад = (n1макс + n1мин)/2-[(n1макс + n1мин)/2-n1тест*] = n1тест* при значениях n1мин ≤ n1тест* < n1тест ≤ n1макс и n2зад = (n2макс + n2мин)/2-[(n2макс + n2мин)/2-n2тест] = n2тест при значениях n2мин ≤ n2тест < n2тест* ≤ n2макс или n2зад = (n2макс + n2мин)/2-[(n2макс + n2мин)/2-n2тест*] = n2тест* при значениях n2мин ≤ n2тест* < n2тест ≤ n2макс соответственно.
С1 = (n1макс + n1мин)/(2·n1тест), (1)
С2 = (n2макс + n2мин)/(2·n2тест), (2)
С1* = (n1макс + n1мин)/(2·n1тест*), (3)
С2* = (n2макс + n2мин)/(2·n2тест*). (4)
Алгоритм управления параметрами тяги n1 и n2 в САУ силовой установкой самолёта, содержащей два ТРДД с минимальной «разнотяговостью», описывается следующими формулами для регулируемых значений n1рег = n1 + δn1 и n2рег = n2 + δn2 этих параметров ТРДД 1 и регулируемых значений n1рег* = n1* + δn1* и n2рег* = n2* + δn2* тех же параметров ТРДД 2 при асимметрии тяги этих ТРДД из-за неисправности (отказа) одного из них:
n1рег = n1 + [n1зад-(n1* + С1*·dn1*/dt)] при n1зад>n1* + С1*·dn1*/dt, (5)
n1рег* = n1* + [n1зад-(n1 + С1·dn1/dt)] при n1зад>n1 + С1·dn1/dt, (6)
n2рег = n2 + [n2зад-(n2* + С2*·dn2*/dt)] при n2зад>n2* + С2*·dn2*/dt, (7)
n2рег* = n2* + [n2зад-(n2 + С2·dn2/dt)] при n2зад>n2 + С2·dn2/dt. (8)
Рост уровня тяги ТРДД 2 при n1 + С1·dn1/dt < n1зад из-за неисправности (отказа) ТРДД 1 обеспечивает блок увеличения тяги ТРДД 2 за счёт увеличения частоты вращения его РНД до величины n1рег* = n1* + [n1зад-(n1 + С1·dn1/dt)].
Рост уровня тяги ТРДД 2 при n2 + С2·dn2/dt < n2зад из-за неисправности (отказа) ТРДД 1 обеспечивает блок увеличения тяги ТРДД 2 за счёт увеличения частоты вращения его РНД до величины n2рег* = n2* + [n2зад-(n2 + С2·dn2/dt)].
Рост уровня тяги ТРДД 1 при n1* + С1*·dn1*/dt < n1зад из-за неисправности (отказа) ТРДД 2 обеспечивает блок увеличения тяги ТРДД 1 за счёт увеличения частоты вращения его РНД до величины n1рег = n1 + [n1зад-(n1* + С1*·dn1*/dt)].
Рост уровня тяги ТРДД 1 при n2* + С2*·dn2*/dt < n2зад из-за неисправности (отказа) ТРДД 2 обеспечивает блок увеличения тяги ТРДД 1 за счёт увеличения частоты вращения его РНД до величины n2рег = n2 + [n2зад-(n2* + С2*·dn2*/dt)].
Величина n1рег при асимметрии тяги этих двух ТРДД складывается из величины параметра тяги n1 и величины разностного сигнала n1зад-(n1* + С1*·dn1*/dt), который определяется разницей заданной величины параметра тяги n1зад и величины суммарного сигнала n1* + С1*·dn1*/dt от ТРДД 2, если n1зад-(n1* + С1*·dn1*/dt) > 0, т.е. n1* + С1*·dn1*/dt < n1зад. Раскрыв скобки в формуле (5), можно упростить выражение для n1рег:
n1рег = n1зад + (n1-n1*)-[(n1макс + n1мин)/ (2·n1тест*)]·(dn1*/dt). (9)
Проверка правильности полученных таким образом соотношений параметров тяги n1 и n1* при исправном функционировании обоих ТРДД подтверждает, что в тех случаях, когда разностный сигнал n1зад-(n1* + С1*·dn1*/dt) = 0, имеет место равенство n1рег = n1, как и требуется в полёте двухдвигательного самолёта с симметричной тягой.
Величина n1рег* при асимметрии тяги этих двух ТРДД складывается из величины параметра тяги n1* и величины разностного сигнала n1зад-(n1 + С1·dn1/dt), который определяется разницей заданной величины параметра тяги n1зад и величины суммарного сигнала n1 + С1·dn1/dt, если n1зад-(n1 + С1·dn1/dt) > 0, т.е. n1 + С1·dn1/dt < n1зад. Раскрытие скобок в формуле (6) позволяет упростить выражение для n1рег*:
n1рег* = n1зад + (n1*-n1)-[(n1макс + n1мин)/ (2·n1тест)]·(dn1/dt). (10)
Проверка правильности полученных таким образом соотношений параметров тяги n1* и n1 при исправном функционировании обоих ТРДД подтверждает, что в тех случаях, когда разностный сигнал n1зад-(n1 + С1·dn1/dt) = 0, имеет место равенство n1рег* = n1*, как и требуется в полёте двухдвигательного самолёта с симметричной тягой.
Величина n2рег при асимметрии тяги этих двух ТРДД складывается из величины параметра тяги n2 и величины разностного сигнала n2зад-(n2* + С2*·dn2*/dt), который определяется разницей заданной величины параметра тяги n2зад и величины суммарного сигнала n2* + С2*·dn2*/dt от ТРДД 2, если n2зад-(n2* + С2*·dn2*/dt) > 0, т.е. n2* + С2*·dn2*/dt < n2зад. Раскрыв скобки в формуле (7), можно упростить выражение для n2рег:
n2рег = n2зад + (n2-n2*)-[(n2макс + n2мин)/ (2·n2тест*)]·(dn2*/dt). (11)
Проверка правильности полученных таким образом соотношений параметров тяги n2 и n2* при исправном функционировании обоих ТРДД подтверждает, что в тех случаях, когда разностный сигнал n2зад-(n2* + С2*·dn2*/dt) = 0, имеет место равенство n2рег = n2, как и требуется в полёте двухдвигательного самолёта с симметричной тягой.
Величина n2рег* при асимметрии тяги этих двух ТРДД складывается из величины параметра тяги n2* и величины разностного сигнала n2зад-(n2 + С2·dn2/dt), который определяется разницей заданной величины параметра тяги n2зад и величины суммарного сигнала n2 + С2·dn1/dt, если n2зад-(n2 + С2·dn2/dt) > 0, т.е. n2 + С2·dn2/dt < n2зад. Раскрытие скобок в формуле (8) позволяет упростить выражение для n2рег*:
n2рег* = n2зад + (n2*-n2)-[(n2макс + n2мин)/ (2·n2тест)]·(dn2/dt). (12)
Проверка правильности полученных таким образом соотношений параметров тяги n2* и n2 при исправном функционировании обоих ТРДД подтверждает, что в тех случаях, когда разностный сигнал n2зад-(n2 + С2·dn2/dt) = 0, имеет место равенство n2рег* = n2*, как и требуется в полёте двухдвигательного самолёта с симметричной тягой.
Такая формализация принципа работы предлагаемой САУ силовой установкой самолёта, содержащей два ТРДД с минимальной «разнотяговостью», при асимметрии их тяги из-за отказа или частичной потери тяги одного из них соответствует логике управления ими, отображённой на логической схеме алгоритма работы этой САУ. Логическая схема алгоритма работы предлагаемой САУ силовой установкой самолёта, содержащей два ТРДД с минимальной «разнотяговостью», приведена на рис. 2, где параметры αРУД, С1, С2, n1 и n2 одного ТРДД обозначены идентификаторами a(1), С(1,1), С(1,2), n(1,1) и n(1,2), а те же параметры другого ТРДД – идентификаторами a(2), С(2,1), С(2,2), n(2,1) и n(2,2) соответственно. Общие для обоих ТРДД параметры αРУДзад, n1зад, n2зад, Vc, Vcзад и сигналы I1, I2, I3, I4, IП, IТ обозначены на этой схеме идентификаторами A, n(1), n(2), Vc, V и I1, I2, I3, I4, Iп, Iт, а условные номера ТРДД и их роторов – идентификаторами J, K и L соответственно.
Заключение
Предлагаемая САУ силовой установкой самолёта с двумя ТРДД, успешно прошедшими выходной контроль с ужесточёнными условиями заводской приёмки, обеспечит повышение безопасности полёта, если в ней реализован метод минимизации «разнотяговости» и асимметрии тяги ТРДД в трёхмерной постановке задачи компенсации их «разнотяговости» и асимметрии тяги путём введения поправок δn1 и δn1 управляющих факторов n1 и n2. В качестве таких поправок можно использовать взвешенные значения 1-ой производной частоты вращения РНД δn1 = С1·dn1/dt и 1-ой производной частоты вращения ротора КВД δn2 = С2·dn2/dt, если весовые коэффициенты С1 и С2 зависят от динамических свойств роторов.
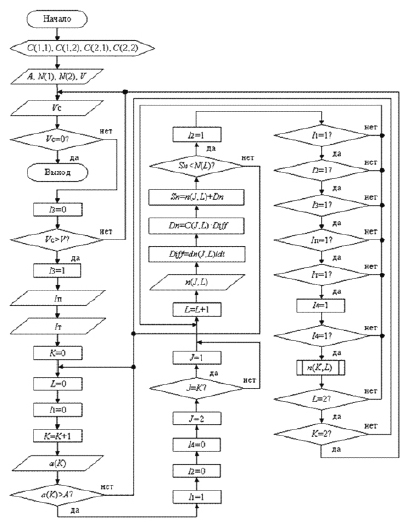
Рис. 2. Логическая схема алгоритма работы предлагаемой САУ силовой установкой самолёта, содержащей два ТРДД с минимальной «разнотяговостью», при асимметрии их тяги в полёте
Достоверность такого решения поставленной задачи подтверждается результатами математического и программного моделирования, так как оно согласовывается с практикой двигателестроения и научными методами, изложенными в научных публикациях [1–4]. А его эффективность заключается в том, что эта САУ выдаёт более точную оценку необходимости повышения тяги одного ТРДД при отказе другого ТРДД по сравнению с известными САУ.
Библиографическая ссылка
Новичков В.М., Бурова А.Ю. ФОРМАЛИЗАЦИЯ ПРИНЦИПА РАБОТЫ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СИЛОВОЙ УСТАНОВКОЙ САМОЛЁТА В ПОЛЁТЕ ПРИ АСИММЕТРИИ ТЯГИ ЕГО ТУРБОРЕАКТИВНЫХ ДВУХКОНТУРНЫХ ДВИГАТЕЛЕЙ С МИНИМАЛЬНОЙ «РАЗНОТЯГОВОСТЬЮ» // Фундаментальные исследования. 2017. № 11-2. С. 311-319;URL: https://fundamental-research.ru/ru/article/view?id=41941 (дата обращения: 15.02.2026).