



В России создана дочерняя компания известной компании ОАО «ВИСТ групп» для реализации первого проекта «Интеллектуальный Карьер» в виде роботизированного горного производства. В связи с этим была создана Межведомственная секция Научного совета РАН по проблемам горных наук «Интеллектуальное горное предприятие». Предполагается, что разработчики интеллектуальных систем будут создавать роботизированные комплексы на базе самых распространенных типов российской техники и стран СНГ, применяемых при добыче полезных ископаемых, а именно, карьерных самосвалов типа БЕЛАЗ, экскаваторов типа ЭКГ, типовых бульдозеров и т.д. [7].
В отличие от проекта [7], предназначенного для добычи полезных ископаемых при открытых горных работах с применением роботизированных карьерных самосвалов, в этой работе развивается известный подход [6] с системой диспетчеризации горно-транспортного комплекса «КАРЬЕР» (АСУ ГТК «КАРЬЕР»), но в виде автоматизированной системы диспетчерского управления (АСДУ) горно-транспортным комплексом горного предприятия. Также в отличие от [7] в развиваемой АСДУ основной мониторинг и управление процессом добычи полезных ископаемых, например, руды, будет осуществляться с помощью операторов или/и диспетчеров с центрального (ЦПУ) и других пунктов управления на базе автоматизированных рабочих мест (АРМ), а также и с других мест, например, с учетом АРМ главных специалистов горного предприятия. Кроме того, в состав горно-транспортного комплекса, кроме карьерных самосвалов БЕЛАЗ, экскаваторов ЭКГ и др., будет входить дробильная машина первичного дробления, например, типа ККД, т.е. конусная дробилка крупного дробления, находящаяся вблизи карьера и т.д. [10].
Развиваемая АСДУ в целом предназначена для мониторинга функционирования карьерных машин и процесса добычи полезных ископаемых, т.е. осуществляется контролирование как основных параметров различных агрегатов, аппаратов, карьерных машин и другого оборудования для получения информации с датчиков о техническом их состоянии, так и о физических величинах, характеризующих процесс добычи руды при открытых горных работах. Полученные данные контроля, например, технологических параметров предназначаются как для управления горно-транспортным комплексом, так и при оптимизации процесса добычи полезных ископаемых, а также являются основой для автоматизированного управления исходным процессом, особенно для его оперативного управления в режиме реального времени, когда необходимо контролировать и управлять в условиях относительно быстрых изменений в исходном процессе.
Следует отметить, что для этой АСДУ рассматриваются только два основных уровня автоматизированного управления горным предприятиям (их, как правило, четыре [1, 5]), а именно, уровень управления в виде SCADA level, расположенного над нижним уровнем (Control level) с автоматизированными локальными контурами (АЛК) контроля и/или управления горно-транспортным комплексом. Особенность контура автоматизированного управления в виде SCADA level заключается в том, что он является самым интенсивным по объему информации и самым жестким по времени реакции на происходящие события при добыче полезных ископаемых. Использование SCADA-технологий позволяет на уровне распределенных объектов управления (горно-транспортного комплекса), осуществлять процессы сбора информации в режиме реального времени, обработки, анализа и возможностью управления удаленными объектами.
С позиции программно-аппаратной реализации АСДУ, как автоматизированной системы контроля, так и управления горно-транспортным комплексом система представляется в виде 3-уровневой, т.е. с учетом верхнего, среднего и нижнего с распределенными объектами. Блок-схема этой АСДУ показана на рис. 1.
На нижнем уровне АСДУ в условиях добычи полезных ископаемых при открытых горных работах находятся следующие основные АЛК контроля и/или управления горно-транспортным комплексом:
1. АЛК 1 контроля и управления экскаваторами типа ЭКГ с учетом [6].
2. АЛК 2 контроля карьерных самосвалов типа БЕЛАЗ с учетом [6].
3. АЛК 3 контроля и управления дробильной машиной типа конусной дробилки.
На различных уровнях АСДУ горно-транспортным комплексом используется как промышленная сеть типа RS-485 на основе гибкой кабельной инфраструктуры, построенная на лучших в своем классе оптоволоконных/медных компонентах, так и сеть Ethernet (ЛВС – локальная вычислительная сеть), а также беспроводная сеть на основе, например, технологий спутниковой навигации ГЛОНАСС или на других принципах передачи данных с возможностью применения беспроводных модулей передачи и приема информации.
В состав аппаратных средств нижнего уровня могут также входить: модули аналогового и дискретного ввода/вывода, блоки релейной коммутации, таймеры/счетчики и др. Нижний уровень АСДУ предназначен для автоматизированного контроля и управления горно-транспортным комплексом, а также формирования первичной информации для передачи ее на верхний уровень. Следовательно, на нижнем уровне АСДУ замыкаются самые «короткие» контуры управления типа АЛКi процессом при добыче полезных ископаемых на базе горно-транспортного комплекса с помощью автоматических электронных регуляторов на базе контроллеров, как правило, специализированного типа и/или программно-логического [8], а также осуществляется автоматизированный мониторинг состояния различных систем. Считается, что ОУi на этом уровне – это некоторый канал регулирования, например, дробилки типа ККД (см. рис. 1).
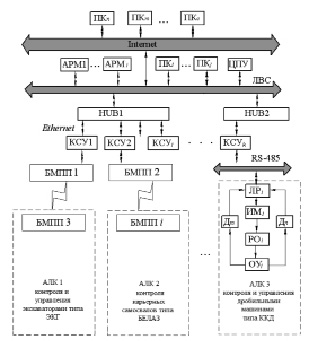
Рис. 1. Блок-схема АСДУ горно-транспортным комплексом горного предприятия: ПКi – персональный компьютер; ЛРi – локальный контроллер; ИМi – исполнительный механизм; РОi – регулирующий орган; ОУi – объект управления; Дm, Дn – датчики технологических параметров; БМПП1, … , БМППi – беспроводные модули передачи и приема информации; HUBi – одно из типовых устройств для построения компьютерных сетей
На среднем уровне АСДУ находятся контроллеры среднего уровня КСУ1, … , КСУk с применением различных интерфейсов связи. Особенность среднего уровня АСДУ заключается в том, что он предназначен для передачи команд управления с верхнего уровня на нижний, а также сбора информации с регуляторов нижнего уровня, первичных измерительных преобразователей (датчиков) и других приборов для передачи полученной информации на верхний уровень этой системы.
Верхний уровень АСДУ предназначен для наблюдения, регулирования, получения информации и архивирования данных по процессам, протекающим на объектах горно-транспортного комплекса и др. На этом уровне происходит взаимодействие оператора с различными процессами с помощью человеко-машинного интерфейса, реализованного с помощью пакетов ПО SCADA-систем. На этом уровне АСДУ расположен ЦПУ на базе сервера с АРМ диспетчера, а также ПК с другими АРМ, например, главных специалистов предприятия. С помощью ЛВС специалисты горного предприятия осуществляют доступ к параметрам АСДУ горно-транспортным комплексом. В этой системе предусмотрен удаленный доступ к параметрам состояния горно-транспортного комплекса, параметрам технологического процесса и другим параметрам с помощью, например, сети Internet и ЛВС, т.е. имеется возможность для главных специалистов, находящихся, например, в командировках, наблюдать публикуемую информацию о функционировании АСДУ в Internet, причем без доступа к настройкам АСДУ.
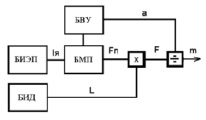
Рис. 2. Функциональная схема модуля измерения массы руды в ковше экскаватора: БИЭП – блок измерения параметров электропривода подъема; БМП – блок моделирования подъема; БИД – блок измерения длины рукояти экскаватора; БВУ – блок вычисления ускорения. Iя – ток якоря электродвигателя механизма подъема; a – линейное ускорение; L – текущая длина рукояти; Fп – вертикальная составляющая усилия подъема; F – усилие в рукояти; m – масса руды в ковше
Более подробно рассмотрим нижний уровень АСДУ на базе АЛКi. АЛК 1 представляет собой систему мониторинга параметров карьерного экскаватора. Данная система на базе нечёткого регулятора и датчиков тока электроприводов вычисляет массу руды в ковше экскаватора и осуществляет контроль процесса погрузки руды в карьерный самосвал, а также диагностирует систему электроприводов экскаватора. Функциональная схема измерительного модуля представлена на рис. 2 [2, 3]. В отличие от [6] в АЛК 1 предусмотрено применение модуля измерения массы руды в ковше экскаватора, разработанного для этих целей. При наличии модуля измерения массы в кузове самосвала [6] и разработанного модуля существенно расширяется мониторинг процесса погрузки руды, учитывая соотношения массы руды в ковше и в кузове самосвала. Также предусматривается передача информации как от экскаваторщика к водителю самосвала, так и обратно.
Полученная с помощью датчиков информация о токах и напряжениях в электроприводах подъема, поворота и напора, длинах канатов и вылета рукояти экскаватора поступает в контроллер универсального типа, где производятся вычисления и затем на экран монитора оператора поступает информация, которая также отображается на экране монитора экскаваторщика о состоянии электроприводов, токах, массе руды в ковше экскаватора, о самосвале (на основании данных с АЛК 2), о количестве погруженной руды в самосвал, количестве погруженной руды за рабочую смену, наличии налипшего материала в ковше и учета его при вычислении загружаемой массы руды, времени цикла погрузки, о количестве циклов, времени работы и простоя экскаватора. Система оповещает оператора об аварийных ситуациях и перегрузках. Также на основании полученной информации о массе и объему руды в ковше экскаватора можно определить условную плотность исходного материала, т.е. сделать вывод о соотношении полезного минерала и пустой породы.
Вся полученная информация поступает по беспроводной связи (например, при помощи Wi-fi модуля) на верхний уровень – к оператору, который так же может контролировать местоположения карьерных машин (используя данные системы ГЛОНАСС), их состоянии (экскаваторщик также может сигнализировать и сообщить о неисправностях или других проблемах), производительности, количества загрузок и частично о массе добываемой руды, а также определять состояние экскаватора (простой, длительность простоя по времени и другие дополнительные параметры с учетом датчиков, находящихся на экскаваторе).
Аналогично, в АЛК 2 происходит сбор информации о параметрах карьерного самосвала: его скорости, местоположении, времени в пути, о количестве циклов за смену, времени простоя, о его техническом состоянии, о данных загруженности самосвала с учетом контроля и погрузки руды экскаватором. Известно, что перегрузка самосвала по массе сказывается на его износе и приводит к авариям, соответственно недогрузка его уменьшает эффективность транспортировки руды из карьера. Данные о местоположении самосвалов (с учетом системы ГЛОНАСС) позволяют диспетчеру организовывать наиболее эффективную работу по транспортировке, не допуская аварийных ситуаций, получать данные о проблемах, возникших в пути, и контролировать машину в движении. Данная система позволяет поддерживать контроль и передачу информации в режиме реальном времени.
В АЛК 3 происходит сбор информации о параметрах состояния дробилки (температурах подшипников в технологических агрегатах и жидкой смазки, состоянии перегрузочных узлов и др.), о технологических параметрах процесса дробления (количестве загруженной руды, количестве руды после дробления, о расходе руды, мощности, потребляемой электродвигателем дробилки, числе загрузок дробилки и др.). В АЛК 3 также предусмотрено автоматизированное управление процессом дробления по различным каналам регулирования ОУi дробилки путем изменения параметров контроллеров с верхнего уровня АСДУ. Также в АЛК 3 предусмотрен мониторинг и регулирование централизованной системы жидкой смазки дробилки, обеспечивающей ее работоспособность [4].
Рассмотрим, например, процесс управления в составе нижнего уровня АСДУ с учетом конусной дробилки ККД по аналогии с работами [9, 10] по одному из каналов регулирования «расход руды Gр(t) – мощность, потребляемая электродвигателем дробилки Рэд(t)». Принцип управления дробилкой ККД в этом случае связан со стабилизацией потребляемой мощности электродвигателя дробилки путем изменения расхода исходной руды. Выходной параметр ОУi дробилки измеряется с помощью датчика мощности.
Структурная схема автоматизированного управления процессом дробления показана на рис. 3, при этом обозначения следующие:
- Wру(p) – передаточная функция блока регулятора контроллера;
- Wпч(p) – передаточная функция блока преобразователя частоты;
- Wэд0(p) – передаточная функция электродвигателя привода питателя;
- Wвп(p) – передаточная функция вибрационного питателя;
- Wоу(p) – передаточная функция объекта управления (ОУ), т.е. дробилки ККД по заданному каналу регулирования;
- Wдм(p) – передаточная функция датчика мощности.
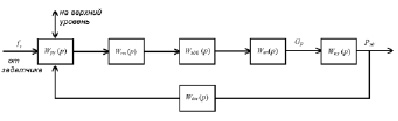
Рис. 3. Структурная схема управления процессом дробления по каналу регулирования «расход руды Gр(t) – мощность, потребляемая электродвигателем дробилки Рэд(t)»
Согласно [10] с учетом динамической характеристики ОУ по каналу регулирования «расход руды Gр(t) – мощность, потребляемая электродвигателем дробилки Рэд(t)» уравнение движения ОУ представляется в следующем виде:
 , (1)
, (1)
где Рэд(t) – регулируемая величина ОУ по заданному каналу регулирования; Gр(t) – регулирующая величина ОУ по заданному каналу; kОУ, TОУ – соответственно коэффициент передачи и постоянная времени ОУ по каналу регулирования, τ – время запаздывания.
Постоянные TОУ и τ определяются из динамических характеристик ОУ по заданному каналу регулирования. Например, исходя из динамических характеристик ОУ с учетом данных [10] и по аналогии [8]. Коэффициент передачи kОУ определяется из статической характеристики ОУ или из динамических характеристик ОУ по заданному каналу регулирования с учетом изменения соотношения входных и выходных величин, а именно, следующим образом:
kОУ = ΔРэд / ΔGр, (2)
где ΔРэд – приращение регулируемой величины ОУ, т.е. изменение мощности; ΔGр – приращение регулирующей величины ОУ, т.е. изменение величины расхода руды.
Тогда передаточная функция ОУ в общем виде с учетом уравнения (1) следующая:
 . (3)
. (3)
Для расчета и построения переходной характеристики «датчик – объект управления» по заданному каналу регулирования необходимо учесть Wдм (p). Как правило, передаточные функции датчиков имеют вид апериодического звена
 (4)
(4)
где kдм – коэффициент передачи датчика, т.е. его чувствительность; Тдм – постоянная времени датчика. Для датчиков мощности можно пренебречь величиной Тдм, так как TОУ >> Тдм. Расчет параметров настройки регулятора можно выполнить по динамической характеристике «датчик – объект управления», учитывая особенности ОУ, т.е. его большую инерционность.
Следовательно, при автоматизированном управлении процессом дробления, например, с верхнего уровня АСДУ имеется возможность изменять параметры уставки (величину задатчика, например, fз, см. рис. 3) блока регулятора специализированного контроллера в системе управления дробилкой ККД по каналу регулирования ОУ «расход руды Gр(t) – мощность, потребляемая электродвигателем дробилки Рэд(t)».
Выводы
1. Установлено, что в отличие от АСУ ГТК «КАРЬЕР» в АЛК 1 предусмотрено применение разработанного модуля измерения массы руды в ковше экскаватора, что при наличии известного модуля измерения массы руды в кузове самосвала существенно расширяет возможности мониторинга процесса погрузки руды, учитывая соотношения массы руды в ковше экскаватора и в кузове самосвала. Имеется возможность развивать проект АСДУ горно-транспортным комплексом, что позволит существенно сократить расходы в сравнении с проектом «Интеллектуальный Карьер», предназначенным для добычи полезных ископаемых при открытых горных работах в условиях, не требующих присутствия людей и с применением роботизированных карьерных машин.
2. С позиции программно-аппаратного создания АСДУ горно-транспортным комплексом развивается подход на основе 3-уровневой системы с учетом верхнего, среднего и нижнего с распределенными объектами, как одного из возможных вариантов АСДУ. В целом развиваемая АСДУ горно-транспортным комплексом позволит увеличить эффективность работы горного предприятия путем оптимизации процесса добычи полезных ископаемых при открытых горных работах.
Библиографическая ссылка
Потапенко А.Н., Гайдуков К.Ю., Медведев В.В. ОСОБЕННОСТИ АВТОМАТИЗАЦИИ КАРЬЕРНЫХ МАШИН В СОСТАВЕ АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ // Фундаментальные исследования. 2016. № 9-1. С. 56-61;URL: https://fundamental-research.ru/ru/article/view?id=40695 (дата обращения: 03.07.2025).