



Проблема управления объектами маятникового типа является фундаментальной для ряда областей науки, поскольку ее решение нашло отражение в теории автоматического управления, робототехнике [8] и используется при моделировании летательных аппаратов, при решении задач стабилизации положения объектов на подвижной платформе, при разработке специальных средств передвижения – сегвеев и др.
Физический маятник – это одна из простых и наиболее распространенных физических моделей, представляющая собой груз, колеблющийся на нерастяжимой нити или жестком стержне. Частным случаем такой системы является обратный маятник, который представляет собой неустойчивый физический объект, обладающий двумя положениями равновесия: в нижней и верхней точках. При этом любое, сколь угодно малое возмущение способно вывести маятник из верхнего положения равновесия с последующим стремлением его перейти в нижнее положение равновесия. Для стабилизации маятника в верхней точке система может дополняться различными элементами, обеспечивающими обратную связь – необходимую составляющую системы управления [6].
Решению задачи стабилизации верхнего положения для перевернутого маятника посвящены работы [1, 2, 5]. Модель системы выражается следующим уравнением:

где m – масса маятника; l – длина подвеса маятника; J – момент инерции маятника; θ – угол наклона маятника от вертикали; a – ускорение движения точки подвеса маятника (каретки); g – ускорение свободного падения. Проведя преобразования, получаем

Следовательно, на движение системы влияют следующие параметры: масса и длина подвеса маятника и ускорение движения его точки подвеса – каретки.
Описание работы системы
В данной работе была поставлена задача смоделировать процесс выведения маятника в крайнее верхнее положение с последующей стабилизацией этого положения при использовании лабораторного стенда ТР-802 фирмы Festo (Германия) в качестве задатчика крайнего верхнего положения маятника, а также других компонентов, используемых для созданной системы стабилизации.
1.Стратегия выведения маятника в верхнее положение равновесия
Очевидно, что возможности выведения маятника в крайнее верхнее положение равновесия ограничены параметрами (вчастности, длиной привода и максимально возможным значением ускорения движения каретки) лабораторного стенда ТР-802 фирмы Festo, на базе которого решается поставленная задача. Так, максимальное ускорение движения каретки a=4м/с2.
Путем математических расчетов было установлено, что пороговое значение ускорения движения маятника, определяющее необходимое количество изменения кареткой направления своего движения, является a0=13,1м/с2. Поскольку при использовании лабораторного стенда Festo ТР-802 это значение намного превышает максимально возможное значение ускорения каретки, в данной работе была использована такая стратегия вывода обратного маятника, при которой многократно изменяется направление движения каретки и увеличивается смещение каретки от текущего положения.
2. Математическое описание вывода маятника в крайнее верхнее положение
Известно, что для достижения маятником своего верхнего положения равновесия его потенциальная энергия должна достичь значения Ep=2mpgl, где mp – масса маятника; l – длина маятника; g – ускорение свободного падения. При этом учитывается, что mp=0,06кг, l=0,25м, g=10м/с2. Таким образом, для решения поставленной задачи потенциальная энергия маятника должна стать равной Ep=0,3Дж.
Было решено, что раскачка маятника будет проводиться следующим образом: электромеханический привод смещает каретку относительно исходного положения на фиксированное число шагов сначала в отрицательном направлении, потом в положительном. Величина смещения от исходного положения возрастает каждый раз после того, как каретка сместилась в том и другом направлении. Для вывода маятника в крайнее верхнее положение равновесия был разработан алгоритм, представленный на рис.1. При этом принято: (1) каретка движется по оси Ox между точками X=0мм и X=300мм; (2) исходное положение каретки – координата X=150мм; (3) N – величина (в мм) смещения каретки от исходного положения, (4)K – задаваемое приращение (в мм) смещения каретки от этого положения.
Принимая во внимание, что при движении каретки с прикрепленным к ней маятником по горизонтальной оси кинетическая энергия движения каретки Eк превращается в потенциальную энергию движения маятника Ep, можно рассчитать прирост энергии маятника. Допустим, величина смещения каретки от исходного положения равна N=50мм, величина задаваемого приращения смещения каретки от исходного положения К=50мм. Тогда величина потенциальной энергии маятника после первого смещения каретки

после второго –
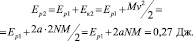
Таким образом, после трех движений каретки потенциальная энергия маятника должна превысить величину, требуемую для вывода его в верхнее положение равновесия.
3. Алгоритм вывода маятникав крайнее верхнее положение
На практике оказалось, что выводы, сделанные в предыдущем пункте с учетом превращения кинетической энергии каретки в потенциальную энергию маятника, не соответствуют экспериментальным данным. Большая часть энергии расходуется в окружающую среду ввиду несовершенства конструкции, трения каретки и подвеса маятника.
Таким образом, физическим объектом управления является обратный маятник, выведенный в крайнее верхнее неустойчивое положение за конечное число движений каретки электромеханического привода, приводимого в движение шаговым двигателем MTR-ST, которым управляет компьютер РС посредством координатного контроллера позиционирования SPC-200 [9]. Начало работы системы стабилизации положения обратного маятника следует за выводом маятника в крайнее верхнее положение. Для решения этой задачи, с учетом [7], были разработаны алгоритм, представленный на рис.1, и соответствующая ему прикладная программа позиционирования каретки. При этом принято, что N – смещение каретки от центра оси привода, а K – задаваемое увеличение смещения каретки от центра оси привода.
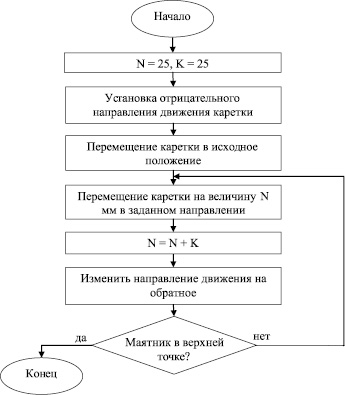
Рис. 1. Алгоритм подпрограммы выведения маятника в верхнее положение
Листинг программы выведения маятника в крайнее верхнее положение, разработанной в ходе эксперимента над системой «каретка - маятник» с использованием программного приложения Festo WinPisa 4.41 [10], представлен ниже. Комментарии с пояснением кода программы приведены напротив соответствующих строк после знака «;».
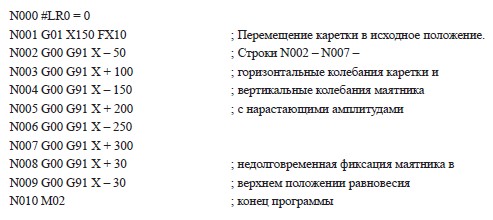
В начале выполнения программы каретка перемещается в центр оси привода. Последующие 9строк программы соответствуют нарастающим колебаниям маятника, по окончании которых кареткой совершаются еще 2перемещения с целью недолговременной стабилизации маятника в верхней точке.
Непосредственно в момент достижения маятником верхнего положения равновесия управление движения системой «каретка – маятник» переходит к разработанной системе стабилизации.
4.Работа системы стабилизации
Одним из важных компонентов этой системы является оптическое устройство для контроля перемещений, описанное в работе [4]. Структура системы приведена на рис.2.
На неподвижном основании1 расположена перемещающаяся по оси Х каретка3, на которой закреплен маятник7 с грузом8, содержащим излучатель9. Каретка жестко связана с шаговым двигателем4 посредством линейного электромеханического привода2. Шаговый двигатель4 управляется через контроллер двигателя5 с помощью контроллера позиционирования6. Компьютер14 управляет работой излучателя9 и дешифратора13, на входы которого поступают сигналы с фотоприемников 10, 11, 12 [3], содержащих устройство преобразования в величину тока, а их выходы связаны с компьютером14. При этом фотоприемник10 является центральным и формирует сигнал на своем выходе только тогда, когда обратный маятник находится в вертикальном положении (верхней точке).
Система работает следующим образом: маятник7 выводится в крайнее верхнее неустойчивое положение равновесия за конечное число движений каретки электромеханического привода, управляемого шаговым двигателем5, причем максимальное расстояние хода каретки составляет 300мм. Закрепленный на грузе маятника8 излучатель света9 включен с момента начала движения маятника7 вверх, а на фотоприемнике10 в момент вертикального положения маятника7 формируется сигнал, который через дешифратор 13 поступает на компьютер 14 и программно фиксируется, что соответствует крайнему верхнему положению маятника. Находясь под воздействием физических сил, маятник не может долго оставаться в этом положении и начинает отклоняться. При отклонении маятника от вертикали изменяется направление света фотоизлучателя, что регистрируется фотоприемниками. По тому, какой ближайший фотоприемник по отношению к фотоприемнику10 первым зарегистрировал сигнал излучателя (Лк или Пк), можно установить координаты маятника (угол отклонения маятника от вертикали) и направление отклонения. Количество фотоприемников и шаг их чередования прямо зависят от требуемой точности измерений.
Находясь под воздействием физических сил, маятник не может долго оставаться в этом положении и начинает отклоняться. При отклонении маятника от вертикали изменяется направление света фотоизлучателя, что регистрируется фотоприемниками. По тому, какой ближайший фотоприемник по отношению к фотоприемнику 10первым зарегистрировал сигнал излучателя (Лк или Пк), можно установить координаты маятника (угол отклонения маятника от вертикали) и направление отклонения. Количество фотоприемников и шаг их чередования прямо зависят от требуемой точности измерений. Информация о положении маятника7 поступает от фотоприемников в компьютер14, обрабатывается по заданной программе, на основании чего формируется управляющее воздействие для контроллера позиционирования 6: сдвинуть каретку в сторону отклонения маятника на определенное число шагов, зависящее от отклонения маятника от вертикали. Таким образом, данная система является замкнутой и позволяет стабилизировать обратный маятник в вертикальном положении. Алгоритм работы системы представлен на рис.3.
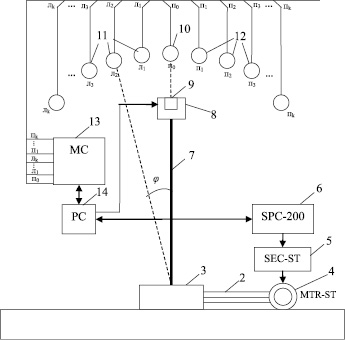
Рис. 2. Структура системы
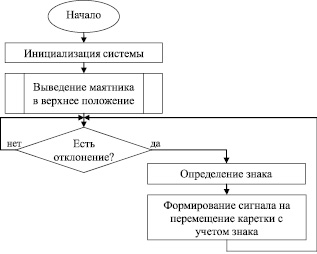
Рис. 3. Алгоритм работы системы
Заключение
Таким образом, в данной работе были разработаны алгоритмы выведения маятника в крайнее верхнее положение равновесия с последующим его удержанием в вертикальном (неустойчивом) положении равновесия. Неидеальность конструкции маятника привела к необходимости выполнения большего числа движений каретки для вывода маятника в верхнюю точку. Также были разработаны принципы построения опто-механической системы стабилизации положения обратного маятника в верхней точке, состоящей из лабораторного электро-механического стенда ТР-802 фирмы Festo и оптического устройства контроля перемещений. Вкачестве рекомендаций предлагается использование полученных результатов для разработки систем мониторинга технологических объектов при перемещении управляемых сканирующих органов по трем координатам.
Библиографическая ссылка
Кузяков О.Н., Андреева М.А. ОПТО-МЕХАНИЧЕСКАЯ СИСТЕМА СТАБИЛИЗАЦИИ ПОЛОЖЕНИЯ ОБРАТНОГО МАЯТНИКА // Фундаментальные исследования. 2016. № 5-3. С. 480-485;URL: https://fundamental-research.ru/ru/article/view?id=40326 (дата обращения: 03.07.2025).