



В настоящее время, несмотря на развитый рынок трёхфазных автономных инверторов напряжения (АИН) и преобразователей частоты, изготавливаемых для электропривода переменного тока, а также для систем электропитания различных ответственных потребителей, существует область технических задач, решить которые с помощью предлагаемого рядом зарубежных фирм готового оборудования невозможно по техническому несоответствию с требованиями заказчика. Также следует отметить, что существует необходимость обеспечения оборонной промышленности страны отечественными разработками. В связи с этим, крайне актуальными являются исследование и разработка трехфазных АИН, применяемых в авиакосмической технике и оборудовании морского базирования. Одним из основных этапов разработки АИН является проектирование системы управления. Любое управление силовым преобразователем в конечном итоге сводится к регулированию времени открытого состояния силового транзистора по отношению к периоду его работы. Известно, что такой метод управления получил название широтно-импульсной модуляции (ШИМ) [1]. Если для сравнения рассмотреть область однофазных преобразователей, в которых преобладающее применение получили полумостовые и мостовые топологии (мощностью 0,5–3 кВт), то построение систем управления данными силовыми схемами не вызывает особых трудностей и перекрывается широким классом производимых промышленностью интегральных ШИМ-контроллеров. При этом, учитывая последнюю тенденцию к построению цифровых (цифро-аналоговых) систем управления силовыми преобразователями [3], для класса трёхфазных инверторов разработано большое количество методов управления [6]. Но при их реализации для решения практических задач, требующих формирования выходного напряжения с повышенными частотами (1–2 кГц), систему управления необходимо разрабатывать собственными силами ввиду отсутствия готовых интегральных решений в виде трёхфазных ШИМ-контроллеров.
Известно, что АИН представляет собой статический преобразователь постоянного напряжения Ed в переменное с помощью полупроводниковых ключей (S1-S6), в качестве которых могут использоваться полевые MOSFET-транзисторы, либо IGBT [2]. Управление транзисторами моста осуществляет система управления (СУ) в соответствии с одним из существующих алгоритмов, с целью обеспечения стабилизированным переменным трехфазным напряжением нагрузки (Zн).
В настоящее время существуют три основных класса СУ: аналоговые, цифровые, смешанные (цифро-аналоговые). Аналоговые СУ уступают сегодня место смешанным, и вектор развития направлен на применение в силовых преобразователях чисто цифровых СУ [3]. Однако скорости работы современных микроконтроллеров и АЦП не столь высоки, чтобы обеспечить необходимое быстродействие цифровой СУ силового преобразователя, функционирующего на частотах 50–100 кГц и более.
Рассмотрим смешанную систему управления (рис. 1), в которой пропорционально-интегро-дифференцирующий (ПИД) регулятор выполнен традиционно с помощью операционных усилителей. Линейное напряжение с выхода инвертора измеряется датчиком напряжения (ДН) и в качестве сигнала отрицательной обратной связи суммируется с сигналом уставки Uуст. Сигнал с выхода ПИД регулятора масштабируется и переводится в цифровой ряд с помощью аналого-цифрового преобразователя, затем подаётся в цифровой формирователь импульсов (ЦФИ), который в соответствии с алгоритмом обеспечивает импульсами управления трёхфазный АИН, используя блок драйверов (БД) для согласования маломощных сигналов управления с низким входным сопротивлением силовых транзисторов. Особый интерес для исследований и разработки в представленной структурной схеме представляет ЦФИ, являющийся прототипом аналогового ШИМ-контроллера, формирующего импульсы управления в функции от суммы сигналов уставки и обратной связи.
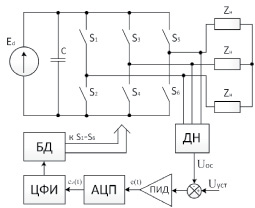
Рис. 1. Структурная схема АИН с цифро-аналоговой системой управления
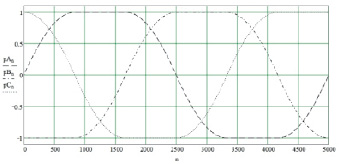
Известно, что с развитием микропроцессорной техники широкое применение получили алгоритмы векторной ШИМ [5, 6]. При реализации этой разновидности ШИМ дважды за период выходной частоты каждая фаза инвертора становится неуправляемой и коммутации силовых ключей в ней не происходит. Для каждой фазы выходного напряжения, дважды за период выходной частоты, наступает интервал, равный π/6, когда значение напряжения этой фазы максимально по модулю (рис. 2). Согласно алгоритму векторной ШИМ на время этого интервала соответствующий ключ (S1–S6), должен оставаться открытым, вне зависимости от коэффициента модуляции Км, который есть не что иное, как сигнал уставки Uуст в относительных единицах, изменяющийся в диапазоне 0–1 (рис. 3). Согласно методу векторной ШИМ период работы (2π) каждой фазы транзисторного моста разделен на 6 равных интервалов по 60 эл. град. (π/3). Развивая далее этот метод, разобьём каждый π/3-интервал на 8 ШИМ-интервалов по 7,5 эл. град. (π/24).
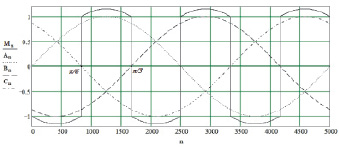
Рис. 2. An, Bn, Cn – сигналы фазных управляющих напряжений; Mn – сигнал предмодуляции 3-й гармоникой
 а
а
 б
б
Рис. 3. Управляющие сигналы, предмодулированные 3-й гармоникой при коэффициенте модуляции km = 1 (а) и km = 0,7 (б)
Таким образом, модуляционное число ШИМ-преобразования М = 48. Рассмотрим случай, когда частота выходного напряжения АИН fвых выбрана равной 1 кГц, тогда частота коммутаций силовых ключей fк = М·fвых = 48 кГц. В этом случае длительность периода ШИМ ТШИМ = 1/48·103 = 20,833 мкс. Практический опыт работы с современными полупроводниковыми приборами показывает, что в режиме жёсткой коммутации ключей работа на данной частоте является близкой к максимальной с точки зрения потерь на переключение в транзисторах. То есть для увеличения частоты выходного напряжения АИН необходимо использовать транзисторы с минимальными динамическими потерями.
Известно, что сигнал ШИМ формируется сравнением напряжения пилообразной развёртки с сигналом управления, при помощи устройства сравнения, например в аналоговых системах – это обычный аналоговый компаратор [1]. Так как в данном случае система формирования импульсов проектируется полностью цифровой, то сравнение производится на цифровых компараторах, а в качестве развертки двухсторонней ШИМ на интервале π/24 используется треугольная цифровая развертка, обеспечиваемая реверсивным счетчиком (рис. 4). Примем заполнение счётчика развёртки или цифрового генератора пилообразной развёртки (ЦГПР) равным N = 500, тогда на интервале 0...π/48 счёт идет от 0 до 500, а на интервале π/48...π/24 – от 500 до 0.
Исходя из максимального значения заполнения N = 500 длительность периода генератора тактовых импульсов счётчика будет равной ТШИМ/2N = 20,833 нс, частота соответственно равна 48 МГц. То есть частота микросхемы ПЛИС, на которой реализуется цифровой схема, должна быть не менее указанной частоты.
При реализации данного вида векторной ШИМ [5] дважды за период выходной частоты со сдвигом π в течение интервалов π/3 управление каждой фазы инвертора делают пассивным, т.е. коммутации силовых ключей с частотой ШИМ в ней не происходит. При этом открыт либо верхний, либо нижний фазный ключ в соответствии с алгоритмом управления. Другие две фазы с помощью ШИМ управляются разворотом длительности 48 кГц импульсов по синусоидальному закону. Таким образом средняя частота коммутации каждого силового ключа в 1,5 раза ниже по сравнению с классической ШИМ, что соответственно снижает потери на переключение.
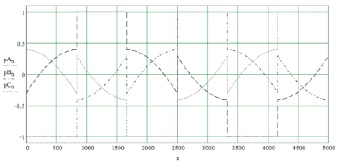
Рассмотрим один из шести π/3 интервалов, когда один ключ полностью открыт, а два других переключаются с частотой 48 кГц, ширина импульсов при этом меняется во времени по гармоническому закону с предмодулированной 3-й гармоникой. Примем середину развертки цифровой пилы N/2 за уровень условной нулевой линии фазных развёрток (рис. 4), тогда синусоидальное напряжение развертки фазы примет вид
где  – коэффициент увеличения амплитуды основной гармоники с учётом добавления 3-й; θ – начальная фаза, а напряжение предмодуляции для данного интервала
– коэффициент увеличения амплитуды основной гармоники с учётом добавления 3-й; θ – начальная фаза, а напряжение предмодуляции для данного интервала
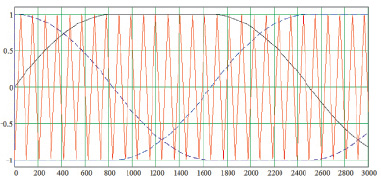
Рис. 4. Эталонные синусоидальные функции, предмодулированные 3-й гармоникой, и сигнал развертки треугольной цифровой пилы
Для второй и третьй фаз полученные выражения будут иметь такой же вид, но начальная фаза θ будет сдвинута на 2π/3. После несложных преобразований получим формулы для подсчёта коэффициентов, представляющих собой ширину импульсов изменяемых во времени:


Расчёт полученных коэффициентов для каждого π/3 интервала одинаков, и их значение изменяется в функции от коэффициента модуляции КМ, значение которого определяется сигналом обратной связи, полученным с датчика напряжения и оцифрованным АЦП. Возможны два способа обработки полученной информации. Первый – расчёт интервальных коэффициентов А1, А2 «на лету», во время работы системы, второй – заполнение ячеек матрицы коэффициентов, с последующей выборкой строки с номером, соответствующим значению КМ в диапазоне 0–1, разбитым на приемлемый (по точности стабилизируемого напряжения) ряд значений. Наиболее надежным представляется второй вариант, когда ЦФИ будет состоять из микроконтроллера и ПЛИС. При этом на микроконтроллер возлагается функция начального подсчета коэффициентов и заполнения матрицы значений с последующей передачей в ПЛИС, где полученная матрица используется для дальнейшей выборки значений с целью передачи их на входы цифровых компараторов.
Основной алгоритм работы ЦФИ реализуется на ПЛИС, функциональная схема ЦФИ представлена на рис. 5. Значения коэффициентов А1, А2, расcчитаны по вышеуказанным формулам и записаны в блоки матриц. Каждый блок содержит по 256 строк, что соответствует 8 бит в двоичной системе (при 8-разрядном АЦП), значение коэффициента КМ = 1 соответствует максимальному значению выхода АЦП, т.е. заполнению выходного байта единицами. Таким образом, необходимо создать 16 матриц по 256 строк в каждой, по 8 матриц для каждого коэффициента, в соответствии с делением π/3 сектора на 8 интервалов.
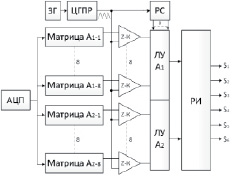
Рис. 5. Функциональная схема цифрового формирователя импульсов
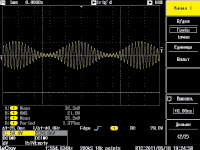 а
а 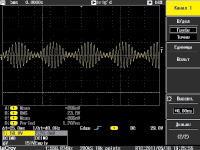 б
б
Рис. 6. Осциллограммы напряжения с выхода инвертора, при изменяющемся сигнале задания: а – частота задания 50 Гц; б – частота задания 100 Гц
На цифровые компараторы Z-К подаются выбранные значения из соответствующей матрицы и цифровой сигнал пилообразной развертки, тогда на выходе каждого компаратора одновременно сформируется прямоугольный импульс необходимой ширины. С помощью регистра сдвига РС и логических устройств ЛУ, построенных на элементах логического И, формируются временные последовательности длительностью π/3, состоящие из 8-ми импульсов. Полученные таким образом временные последовательности подаются на устройство распределения импульсов РИ, которое в соответствии с организацией логики работы ключей моста подает на соответствующий транзистор необходимый сигнал управления.
Практическая реализация разработанного метода [4] осуществлена с помощью устройства, содержащего 32-битный контроллер со встроенным АЦП и микросхемы ПЛИС, на которой спроектирован непосредственно ЦФИ. С целью проверки быстродействия работы системы на вход АЦП был подан синусоидальный сигнал с различной частотой (рис. 6), при этом осциллограммы снимались с выхода инвертора. Из представленных осциллограмм видно, что СУ обладает устойчивостью и хорошими динамическими свойствами.
Таким образом, разработанная с помощью метода векторной ШИМ цифро-аналоговая система управления 3-фазным АИН [4] обладает необходимым быстродействием для формирования и стабилизации выходного напряжения повышенной частоты (1–2 кГц), имеет улучшенные массогабаритные показатели и может использоваться для любого 3-фазного АИН с симметричной нагрузкой.
Рецензенты:
Лукутин Б.В., д.т.н., профессор кафедры электроснабжения промышленных предприятий, Энергетический институт, Национальный исследовательский Томский политехнический университет, г. Томск;
Михальченко С.Г., д.т.н., профессор, заведующий кафедрой промышленной электроники, факультета электронной техники, Томский государственный университет систем управления и радиоэлектроники, г. Томск.
Библиографическая ссылка
Юдинцев А.Г., Юдинцев А.Г., Рулевский В.М. СИСТЕМА УПРАВЛЕНИЯ ТРЁХФАЗНЫМ АВТОНОМНЫМ ИНВЕРТОРОМ С ВЕКТОРНОЙ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ // Фундаментальные исследования. 2015. № 5-1. С. 168-173;URL: https://fundamental-research.ru/ru/article/view?id=38027 (дата обращения: 01.07.2025).