



В экспериментах на животных, находящихся в условиях свободного поведения, одной из важных проблем является дистанционная регистрация физиологических параметров и достоверное определение пространственного положения животного в пределах лабораторной установки.
В настоящее время имеется несколько технических подходов для определения положения животного в пространстве. Наиболее распространённым является способ определения положения животного при помощи инфракрасных оптопар [10]. Имеются так же программно-аппаратные комплексы, основанные на анализе и обработке видеоинформации, поступающей с видеокамеры. К таким системам относится программный пакет ANY-maze [3] или SEE (Software for the Exploration of Exploration, http://www.tau.ac.il/~ilan99/see/help/) [6], [8]. Достоверность работы программы SEE оценивается в [9], где результат её работы сравнивается с методом регистрации положения животных при помощи оптопар, при определении степени тревожности животных в эксперименте «открытое поле» [7]. Также хорошо известна разработка EthoVision фирмы Noldus, http://www.noldus.com [5]. Наконец, системы прямого измерения положения животного при помощи регистрации сигнала с имплантированного или закреплённого на теле животных микропередатчика. Эти системы могут иметь как автономный источник питания, так и получать питание через индуктивную петлю, бесконтактным способом.
Каждый из упомянутых выше программно-аппаратных комплексов имеет свои недостатки и ограничения. Идея определения положения животных на принципе прерывания лучей оптопар хоть и зарекомендовала себя с наилучшей стороны, обладает низкой точностью и невозможностью автоматизированного определения поведенческих актов животных. Программы фирмы ANY-maze, работающие по типу видеотрекинга, т.е. cлежения за животным при помощи видеокамеры с последующей обработкой полученной информации математическими алгоритмами, обладают низкой достоверностью дифференцировки поведенческих актов и отсутствием возможности определения положения частей тела животного, в частности, головы.
Для преодоления указанных методических недостатков предлагаются новые методы обработки видеоинформации с целью улучшения достоверного выявления элементов поведения экспериментальных животных. Например, используются адаптивные модели, в которых для построения сегментов траектории движения используются вероятностные подходы, основанные на марковских моделях [3].
В программе EthoVision разработан специальный графический язык для описания процесса анализа и сбора экспериментальных данных GEPS (Graphical EthoPlayer Script), посредством которого становится возможно оптимизировать сбор и обработку информации [5].
Главным и самым существенным недостатком как систем видеотрекинга, так систем определения положения животного при помощи оптопар является невозможность оценки физиологических параметров у исследуемых животных, например, частоты сердечных сокращений, артериального давления, базальной температуры и т.д.
Активно развивающаяся область микроэлектроники позволяет разработать универсальные системы, которые позволяют регистрировать положение животного, оценивать важные физиологические параметры, осуществить измерение важных химических показателей в организме животных [10, 2] и в автономном режиме оказывать нужные воздействия [1]. Как правило, такие системы состоят из миниатюрного микропередатчика (или микроприёмопередатчика) и специального приёмника (приёмопередатчика), позволяющего не только принимать сигналы, но и декодировать их.
Для исследователей, занятых анализом поведения животных, можно ограничиться использованием только микропередатчика и приёмника. Микропередатчик может быть как имплантирован в животное, так и закреплён на нем. Таким образом, становится возможным прямым методом определять положение животных в пространстве и регистрировать элементы их поведения, достоверность регистрации которых методами видеотрекинга снижена или вовсе невозможна.
Для определения положения животных в пределах экспериментальной установки и регистрации нескольких физиологических параметров нами разработано устройство ‒ микропередатчик. Габариты микропередатчика позволяют его крепить или имплантировать на крысах и других подопытных животных аналогичного или большего размера.
Разработаны две модификации данного устройства. Первый упрощённый вариант позволяет только определять положение крысы в пределах установки. Второй усложнённый вариант с применением миниатюрного 32-битного микроконтроллера ARM с ядром Cortex-M3 фирмы NXP (http://www.nxp.com/) LPC1343, способного закодировать и передать информацию о нескольких измеряемых параметрах, например, данные о температуре тела животного и частоте сердечных сокращений. Структурные схемы обоих микропередатчиков представлены на рис. 1.
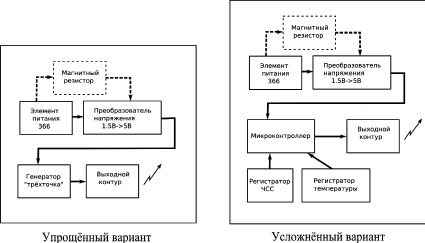
Рис. 1. Структурные схемы микропередатчиков
Для регистрации сигнала с микропередатчиков использовались графические планшеты фирмы Genius (G-pen F610) и разработанный специально аналоговый приёмник.
Графические планшеты устанавливаются горизонтально под полом экспериментальной установки с небольшим перекрытием так, чтобы было возможно отслеживать перемещение животного на всей площади пола. Поверх антенн графических планшетов ставится сам экспериментальный блок, рис. 3, конструкция которого представлена в [4].

Рис. 2. Общий вид установки
Преобразователи напряжения в обеих схемах построены на интегральный микросхеме LT1073 по типовой схеме включения. Для передачи несущей частоты в упрощённой модели микропередатчика используется генератор «трёхточка», схема которого представлена на рис. 4. Указанные номиналы соответствуют использованным. Поскольку микропередатчик работает от одного серебряно-цинкового элемента 366 фирмы Maxell, используется преобразователь напряжения на интегральной микросхеме LT1073 в типовой схеме включения.
Частота работы определяется элементами С1, С5, С7. Начальная точка работы генератора определяется резисторным делителем R5, R6.
Поскольку расчетная рабочая частота генерации составляет 168 кГц, незначительный дрейф частоты (порядка 200 Гц в час) не влияет на качество и точность работы установки.
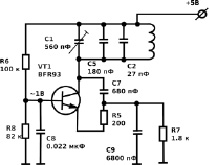
Рис. 3. Принципиальная схема генератора для микропередатчика
В микропередатчике с использованием микроконтроллера выходной контур имеет те же компоненты, что и в генераторе, с той лишь разницей, что транзистор включен по схеме с общим эмиттером (ОЭ) и работает как ключ, элементы С9, R7, С7, R5, R6, R8, C8 исключаются из схемы. Эмиттер транзистора VT1 присоединяется непосредственно на массу, а база транзистора присоединяется непосредственно к одному из выводов порта микроконтроллера.
В приведённой модификации микропередатчика имеется устройство для регистрации частоты сердечных сокращений, представляющее собой обычный электретный микрофон габаритами 2,6×2,6 мм типа FG-23629-P16, позволяющий регистрировать сердечные удары, подключенный тоже непосредственно к одному из портов микроконтроллера. Включение и выключение обоих типов микропередатчиков осуществляется дистанционно, путём подведения магнита к магниторезистору, который можно разместить на плате.
Конструктивно оба микропередатчика выполнены методом навесного монтажа на двухсторонней плате из фольгированного стеклотекстолита, толщиной 0,5 мм, контурная катушка наматывается проводом ПЭВ-0.1 на предварительно сформированном и припаянном на плату каркасе из голых медных проводов, толщиной 0,5 мм. Количество витков катушки составляет приблизительно 300.
Внешний вид двух собранных по упрощенной схеме микропередатчиков представлен на рис. 4. Величина шага масштабной сетки, составляет 5 мм.
Для крепления на животных на микропередатчиках сделаны специальные ушки. Внешний вид микропередатчика, закрепленного на крысе представлен на рис. 5.
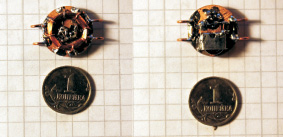
Рис. 4. Внешний вид собранных микропередатчиков

Рис. 5. Животное с закрепленным микропередатчиком
Для получения и оценки данных о перемещении животных имеется специально написанная программа, последовательно опрашивающая графические планшеты и записывающая информацию о перемещении животного в файл формата .csv. Эта программа устанавливается на персональный компьютер с операционной системой Ubuntu 11.04 (Natty Narval), c ядром Linux (2.6.35-32-generic). Стойки животных определяются по кратковременному пропаданию сигнала с микропередатчика, т.к. излучающая антенна располагается перпендикулярно плоскости пола. Периоды иммобильности животных определялись по отсутствию изменения данных о перемещения микропередатчика на антеннами графических планшетов за период времени больше 500 мс.
На рис. 6 представлены треки перемещения крысы при удовлетворении питьевой потребности, в установке, представляющей собой модифицированный вариант клетки [4]. В ходе эксперимента у животного формируется функциональная система, связанная с удовлетворением питьевой мотивации, о процессе формирования которой можно судить по изменяющейся форме трека перемещения животного.
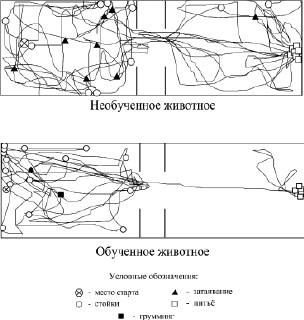
Рис. 6. Внешний вид треков перемещения животного
Научный руководитель исследований – Судаков Константин Викторович, заведующий кафедрой нормальной физиологии Первого Московского медицинского университета им. И.М. Сеченова, г. Москва, доктор медицинских наук, профессор, академик РАМН.
Рецензенты:
Сюзев В.В., д.т.н., профессор, заведующий кафедрой ИУ-6 (Компьютерные системы и сети) Московского государственного университета им. Н.Э. Баумана, г. Москва;
Умрюхин П.Е., д.м.н., профессор, кафедра нормальной физиологии Первого Московского медицинского университета им. И.М. Сеченова, г. Москва.
Работа поступила в редакцию 18.06.2013.
Библиографическая ссылка
Чубаров И.Ю. МИКРОПЕРЕДАТЧИК ДЛЯ РЕГИСТРАЦИИ ФИЗИОЛОГИЧЕСКИХ ПАРАМЕТРОВ И ПРОСТРАНСТВЕННОГО МЕСТОПОЛОЖЕНИЯ ЭКСПЕРИМЕНТАЛЬНЫХ ЖИВОТНЫХ В УСЛОВИЯХ СВОБОДНОГО ПОВЕДЕНИЯ // Фундаментальные исследования. 2013. № 8-1. С. 114-118;URL: https://fundamental-research.ru/ru/article/view?id=31882 (дата обращения: 28.07.2026).