



Транспортно-переместительные операции занимают важное место в процессе лесозаготовок, неслучайно затраты на их выполнение могут превышать половину издержек на проведение всех лесозаготовительных работ [1, 3, 6–9].
В настоящее время на выполнении операций по перемещению древесины от погрузочной площадки (верхнего склада) к потребителю (лесоперерабатывающие предприятие, ЦБК и т.д.) или на нижний склад задействованы лесовозные автопоезда. В странах Таможенного союза в рамках Евразийского экономического сообщества, в частности в России и Белоруссии, используются на вывозке древесины автопоезда различных конструкций и типов, состоящие из тягового автомобиля (автомобиля-тягача) и прицепного звена или звеньев (многокомплектные автопоезда). В зависимости от транспортируемого груза (хлысты, сортименты или деревья) в качестве прицепного звена применяются прицепы-роспуски, полуприцепы или прицепы.
Прицепные звенья, не имеющие ведущих осей, называются пассивными, а при наличии ведущих осей – активными. Наличие активных осей у прицепного транспортного звена позволяет автопоезду передвигаться без существенной потери силы тяги по любым лесовозным дорогам, в том числе и временным (усам). Это делает возможным использовать лесовозные автопоезда подобного типа на транспортировке древесины, исключив из технологической цепочки двухступенчатую вывозку, при этом экономия может составить 15–20 % [3, 8].
В зависимости от технологической цепочки доставки древесины потребителю вывозка древесины может быть одно- или двухстадийной (ступенчатой). Транспортировка древесины осуществляется либо одним типом автопоезда с лесосеки прямо во «двор» потребителю (одностадийная вывозка), либо используются другие технологические решения. Например, при двухстадийной вывозке на первой ступени работают автопоезда повышенной проходимости (транспортировка до промежуточного склада) на второй – повышенной энергоемкости и грузоподъемности.
На транспортировке круглых лесоматериалов широко используются автомобили-сортиментовозы зарубежного производства фирм «Сису», «Скания», «Вольво» и др. В России и Белоруссии производятся автопоезда-сортиментовозы на базе автомобилей Камского, Уральского и Минского автозаводов.
Применяемые на вывозке автопоезда различных типов отличаются многообразием параметров: мощностью двигателя, грузоподъемностью, колесной формулой, проходимостью (и соответственно основным показателем проходимости – коэффициентом сцепной массы kсц) и т.д. Отличаться будет и сфера их применения, так как транспортировка древесины осуществляется в разных дорожных и природно-производственных условиях. Соответственно, на эффективную эксплуатацию лесовозного автопоезда будут оказывать влияние следующие факторы: тип и состояние покрытия, рельеф местности, несущая способность грунтов, расстояние транспортировки, техническое состояние автопоезда и т.д. Например, для обеспечения устойчивого движения по лесовозным усам в плохом состоянии коэффициент сцепной массы должен быть kсц = 0,6, а на усах с покрытием в удовлетворительном состоянии kсц = 0,4–0,5 [8].
Несмотря на преимущества зарубежных автопоездов перед автопоездами, выпускаемыми странами Таможенного союза, в сфере повышенной надежности, комфортности и зачастую энерговооруженности, на практике высокая стоимость и особенности их эксплуатации в сложных природно-производственных условиях оставляют автопоездам, в том числе отечественного производства, шанс на значительную долю рынка. В частности, эффективная работа автопоездов, например SISU E13M K-KK 6×2 + JUKI-4 с колесной формулой 6×2 или 8×2 (kсц менее 0,2), при движении по участкам с низкой несущей способностью грунта (например, лесовозному усу с грунтовым покрытием) в грузовом направлении ограничена недостаточной проходимостью [8]. В этом случае возможно перед съездом на ус отцеплять прицеп, затем осуществлять движение одиночным автомобилем по усу до погрузочной площадки. После погрузки автомобиль возвращается к прицепу и перегружает на него сортименты, затем возвращается на погрузочную площадку для следующей погрузки. Количество таких рейсов зависит от грузоподъемности прицепа. После заполнения его и одиночного автомобиля сортиментами прицеп присоединяется к автомобилю, и автопоезд осуществляет движение в грузовом направлении до потребителя. Естественно, такая технология работ негативно сказывается на производительности автопоезда.
В иных случаях эффективен другой способ двухступенчатой вывозки. С лесосеки на промежуточные склады сортименты перевозятся автопоездами высокой проходимости (в основном отечественного и белорусского производства) с колесной формулой 6×6, обычно на расстояние 10–50 км. С промежуточного склада транспортировка осуществляется лесовозными автопоездами большой грузоподъемности, на базе автомобилей с колесной формулой 6×2, 6×4, обладающими хорошими динамическими качествами. Здесь экономический эффект достигается за счет уменьшения затрат на строительство лесовозных дорог, по которым будет двигаться полноприводный лесовозный автотранспорт.
Автопоезд для транспортировки деревьев или хлыстов состоит из автомобиля-тягача и прицепа-роспуска. Автомобиль-тягач, как правило, трехосный, а прицеп-роспуск – двухосный. Автопоезда-хлыстовозы могут оснащать гидроманипуляторами для самопогрузки, располагая их на тягаче, за кабиной водителя.
Следует учитывать, что при транспортировке деревьев и хлыстов практически никогда не используется полностью грузоподъемность автомобиля и прицепного состава, прежде всего из-за малой длины хлыста и ограничений по выносу вершин хлыстов (деревьев) за коники прицепа. Поэтому коэффициент использования грузоподъемности автопоезда без принятия специальных мер по увеличению объема транспортируемого леса (уширения коников, регулировки расстояния между кониками автомобиля и прицепа, обрезки вершин деревьев) не превышает 0,85 [8].
В России широкое применение нашла установка гидроманипулятора с грейфером непосредственно на лесовозный автопоезд (тяговое или прицепное звено) несмотря на то, что это снижает его грузоподъемность и увеличивает габариты. Установка манипулятора на лесовоз позволяет осуществлять самопогрузку и саморазгрузку без использования вспомогательных средств в виде кранов и лесопогрузчиков. Исходя из этого, решение конструкторских и инженерных задач по модернизации как самого процесса погрузки-разгрузки манипулятором, так и совершенствование конструкции самого манипулятора является важной и актуальной производственной задачей, напрямую влияющей на рентабельность всего технологического процесса транспорта леса.
У автопоезда, состоящего из автомобиля и прицепа, манипулятор устанавливается в задней части платформы автомобиля, что дает возможность загружать им автомобиль и прицеп. При этом манипулятор может жестко крепиться на платформе автомобиля или располагаться на полозьях, которые выдвигаются с помощью гидропривода перед погрузкой и возвращаются в транспортное положение после окончания погрузки. Кроме того, манипулятор имеет аутригеры, выдвигаемые и убираемые вручную или с использованием гидропривода. На автопоездах, состоящих из седельного автомобиля-тягача и полуприцепа, манипулятор, как правило, устанавливается в центре полуприцепа [1, 6–8], но в этом случае становится невозможной перевозка длинномерных лесоматериалов, так как грузовая платформа полуприцепа оказывается разделенной на две части.
Существуют различные компоновочные схемы расположения манипулятора на раме лесовоза. Известна конструкция автопоезда-сортиментовоза [4] в составе тягача и прицепа. Тягач оборудован установленной на его основной раме лесовозной рамой с размещенными на этой раме ограничительной решеткой, расположенной за кабиной, боковыми стойками-кониками. Автопоезд-сортиментовоз содержит противовес, размещенный на жестко закрепленной на ограничительной решетке горизонтальной площадке-кронштейне, расположенной над кабиной автотягача, и гидравлический манипулятор для лесопогрузочных работ, установленный с возможностью осевого перемещения на заднем конце лесовозной рамы, оборудованной направляющими, при этом основная рама удлинена, а отношение веса противовеса к весу гидравлического манипулятора составляет не менее 0,2. В процессе погрузки и разгрузки для повышения устойчивости гидравлического манипулятора используются аутригеры, установленные на транспортном средстве. Недостатками известного автопоезда-сортиментовоза являются сложность конструкции, обусловленная необходимостью размещения над кабиной автотягача противовеса, а также то, что манипулятор не имеет жесткой опоры на поверхность земли, в связи с чем возможны раскачивания манипулятора в процессе работы, обусловленные зазорами в механизме передвижения манипулятора – зазорами в направляющих.
Известен способ сбора пачки сортиментов [5], реализуемый с использованием форвардера, на котором вдоль грузовой платформы проложен транспортный путь в виде двух направляющих, выполненных в виде швеллеров. Данные направляющие располагаются в верхней части коников, установленных на грузовой платформе форвардера. Манипулятор установлен на каркасе, расположенном между двумя направляющими с возможностью перемещения вдоль грузовой платформы. Перемещение каркаса осуществляется с использованием двух расположенных по его краям гидромоторов, приводящих в движение ходовые колеса, передвигающие каркас по направляющим. Недостатком такой конструкции форвардера является ее сложность, так как она требует высокой жесткости коников и их усиленного крепления к грузовой платформе. Кроме того, такая конструкция передвижного манипулятора неприменима к использованию на лесовозных автопоездах, оснащенных полуприцепами, так как управление манипулятором из кабины затруднительно из-за плохого обзора грузовой платформы полуприцепа и зоны погрузки, а установка рабочего места оператора непосредственно на манипуляторе нецелесообразна ввиду сложности организации доступа оператора к рабочему месту на манипуляторе, который передвигается по направляющим, установленным в верхней части коников. Еще одним недостатком конструкции форвардера является то, что манипулятор не имеет жесткой опоры на поверхность земли, в связи с чем возможны раскачивания манипулятора в процессе работы, обусловленные зазорами между ходовыми колесами манипулятора и направляющими, неизбежными упругими деформациями коников, в верхней части которых установлены направляющие, а также деформацией пневмошин форвардера, на котором установлена грузовая платформа с кониками.
Существует конструкция автопоезда, состоящая из седельного тягача с полуприцепом, оснащенным передвижным манипулятором «Kennis» [2]. Полуприцеп оснащен бортами и имеет грузовую платформу с продольными направляющими, по которым передвигается установленный на подвижной раме гидравлический манипулятор. Недостатком такого автопоезда является то, что гидравлический манипулятор не имеет жесткой опоры на поверхность земли, в связи с чем возможны раскачивания манипулятора в процессе работы, обусловленные зазорами в механизме его передвижения – зазорами в продольных направляющих.
На кафедре ТОЛК ПетрГУ была разработана конструкция автопоезда-сортиментовоза с передвижным манипулятором, лишенная вышеперечисленных недостатков.
Одним из направлений повышения производительности и удобства работы лесовозного автотранспорта, оснащенного манипуляторами, является увеличение обслуживаемой площади с одной установки транспортного средства. Поскольку манипуляторы имеют ограниченный вылет, то увеличить обслуживаемую площадь с одной стоянки транспортного средства можно за счет придания манипулятору возможности перемещения вдоль кузова транспортного средства. Кроме того, такая подвижность манипулятора упростит погрузку транспортного средства короткомером, который укладывается в кузов в несколько пачек, когда, ввиду ограниченности вылета манипулятора возникают сложности при погрузке пачки короткомерных лесоматериалов на задней части грузовой платформы. При этом с целью обеспечения безопасности выполнения операций на погрузке-разгрузке лесоматериалов, облегчения и улучшения условий труда оператора, манипулятор должен быть оснащен механизмом фиксирования его положения относительно твердой поверхности дороги.
Примером такой конструкции может служить автопоезд-сортиментовоз с передвижным манипулятором, представленный на рис. 1 и 2.
Автопоезд-сортиментовоз с передвижным манипулятором включает седельный тягач 1, полуприцеп 2, манипулятор 3. На раме полуприцепа установлена грузовая платформа 4, в которой выполнены продольные направляющие 5. По бокам грузовой платформы полуприцепа установлены стойки-коники 6. В продольных направляющих на подвижной раме 7 установлен манипулятор 3. На подвижной раме манипулятора установлены выдвижные телескопические опоры 8 с подпятниками 9, которые имеют такие размеры и ход, что при нахождении в транспортном положении обеспечивается зазор между их наружными торцами и внутренними сторонами 10 стоек-коников, а при нахождении в рабочем положении они выступают за наружные габариты полуприцепа на величину достаточную для установки подпятников на землю.
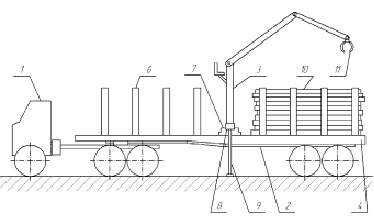
Рис. 1. Автопоезд-сортиментовоз с передвижным манипулятором, находящийся в режиме погрузки
 а
а 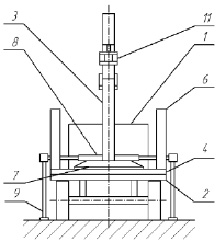 б
б
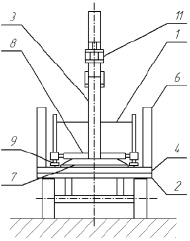
Рис. 2. Вид сзади автопоезда-сортиментовоза с передвижным манипулятором: а – в транспортном положении; б – в рабочем положении
Эксплуатация автопоезда-сортиментовоза осуществляется следующим образом. Автопоезд-сортиментовоз устанавливается в наиболее удобном положении относительно намеченных к погрузке лесоматериалов, обеспечивающем наибольший объем работ с одной установки. Манипулятор путем перемещения по продольным направляющим вдоль грузовой платформы полуприцепа устанавливают в требуемом положении.
Затем приводят выдвижные телескопические опоры в рабочее положение путем выдвижения их телескопических звеньев до тех пор, пока подпятники окажутся за пределами габаритов полуприцепа. Далее подпятники опускают до их упора в поверхность земли (рис. 2, б), что будет обеспечивать устойчивое положение манипулятора относительно твердой поверхности земли. Затем осуществляют поштучный захват лесоматериалов 10 грейферным захватом 11 манипулятора и их укладку на грузовую платформу полуприцепа. После окончания погрузки подпятники поднимают, и выдвижные телескопические опоры приводят в транспортное положение (рис. 2, а).
При необходимости погрузки нескольких пачек лесоматериалов на грузовую платформу полуприцепа сначала формируют одну пачку, затем манипулятор по продольным направляющим перемещают вдоль грузовой платформы полуприцепа и устанавливают в новое положение. Переводят выдвижные телескопические опоры в рабочее положение и осуществляют погрузку лесоматериалов на грузовую платформу полуприцепа в новую пачку. После окончания погрузки выдвижные телескопические опоры переводят в транспортное положение. Затем осуществляют транспортировку лесоматериалов к пункту назначения, где осуществляют разгрузку лесоматериалов, предварительно переведя выдвижные телескопические опоры манипулятора в рабочее положение.
Наличие передвижного манипулятора позволит увеличить обслуживаемую площадь с одной установки транспортного средства, а также упростит погрузку короткомерных лесоматериалов в несколько пачек на грузовой платформе полуприцепа, что позволит повысить производительность на операциях погрузки-разгрузки и увеличит эффективность применения автопоезда. Наличие выдвижных телескопических опор на подвижной раме манипулятора позволит жестко зафиксировать манипулятор относительно земли и тем самым повысить его устойчивость во время проведения погрузочно-разгрузочных работ, а при нахождении в транспортном положении они не будут препятствовать передвижению манипулятора вдоль стоек-коников, что повысит безопасность выполнения операций на погрузке-разгрузке лесоматериалов.