



В настоящее время современный асинхронный электропривод является наиболее доступным и массовым, основным потребителем электрической энергии, составляет основу большинства механизмов общепромышленного назначения и представляет собой сложную электромеханическую систему, у которой электрическая и механическая части находятся в тесной взаимосвязи.
Электрический привод осуществляет управление рабочим процессом приводимого в движение механизма. Требования, предъявляемые к технологическому процессу, определяют необходимость задавать и поддерживать с требуемой точностью на заданном уровне момент двигателя.
Таким образом, при управлении технологическим процессом общепромышленного механизма и реализации ограничений, накладываемых на допустимые нагрузки электрических и механических систем, определяют необходимость знания координат электромеханической системы.
Поэтому задача измерения момента в современных электроприводах представляется очень важной.
Измерение момента возможно производить различными способами. Одни из них связаны с необходимостью измерения мгновенных значений магнитных потоков и токов двигателей. Перемножая соответствующие токи и потоки, можно получить момент двигателя. При этом используются идеализированные зависимости, которые в ряде случаев могут привести к значительным погрешностям измерений, вследствие чего такой метод не получил широкого распространения [2].
В некоторых случаях для измерения электромагнитных моментов двигателей можно воспользоваться методами, которые основаны на измерении крутящего момента, передаваемого через вал. Существуют различные устройства для измерения крутящего момента: балансирные динамометры, торсионные приборы, трансмиссионные динамометры и преобразовательные установки для измерения крутящего момента по вторичным параметрам и т.д. [3, 4].
Однако для того, чтобы получить электромагнитный момент, необходимо присоединить к валу двигателя дополнительное устройство, у которого момент инерции должен быть во много раз больше момента инерции ротора двигателя. Поэтому использование таких методов измерения чаще всего практически нецелесообразно.
В связи с вышеизложенным целью статьи является исследование разработанного авторами устройства косвенного измерения момента трехфазного двигателя в асинхронном электроприводе, которое является простым, надежным и удобным в работе и позволяет в любой момент времени снимать показания [1, 5, 6].
Для достижения поставленной цели в статье предлагается имитационная модель системы и устройства измерения момента в программном пакете MATLAB. Причем исследования проведены для устройств, которые содержат в функциональной схеме асинхронного электропривода двигатель, питаемый от ПЧ с ШИМ и без нее.
Имитационная модель измерения электромагнитного момента асинхронного двигателя с короткозамкнутым ротором (АДКР), созданная в прикладном пакете Simulink компьютерной среды программирования MATLAB, приведена на рис. 1.
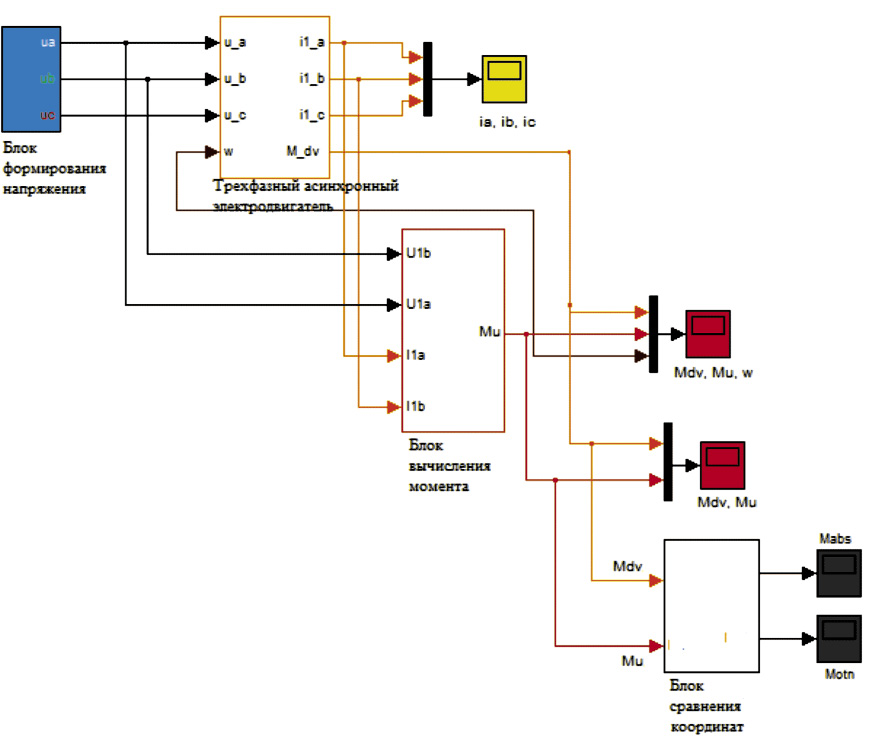
Рис. 1. Блок-схема асинхронного электропривода процедуры измерения
и расчета момента асинхронного электропривода
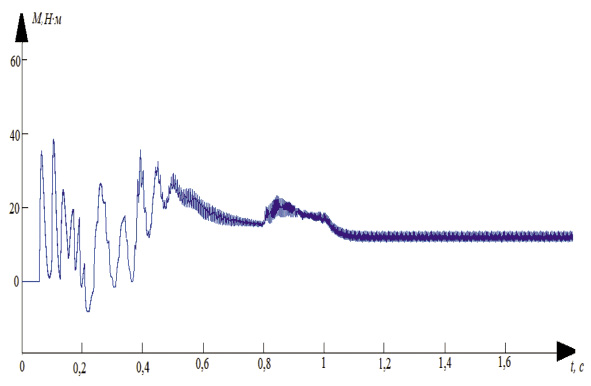
В рассматриваемой модели входными величинами АДКР являются токи и напряжения трехфазной системы координат (A, B, C), а на выходе блока вычисления момента – электромагнитный момент. Результаты моделирования выводятся на многоканальные виртуальные осциллографы. На рис. 2 приведены зависимости характеристик момента от времени (полученные с АДКР – а, с предложенного устройства вычисления момента – б). Исследование осуществляется в режиме пуска асинхронного электродвигателя: время начала моделирования t0 = 0; время окончания моделирования tк = 1 с; с фиксированным шагом интегрирования, расчет проведен по методу Эйлера.
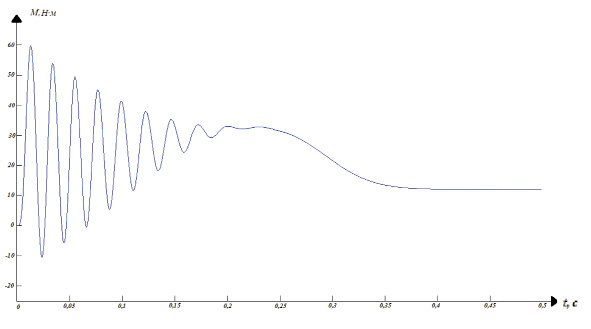
а
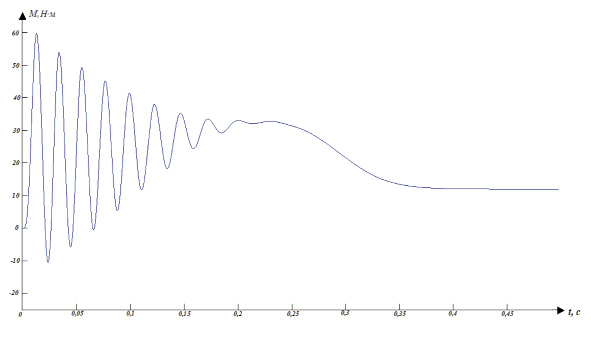
б
Рис. 2. Характеристики момента M(t) АДКР
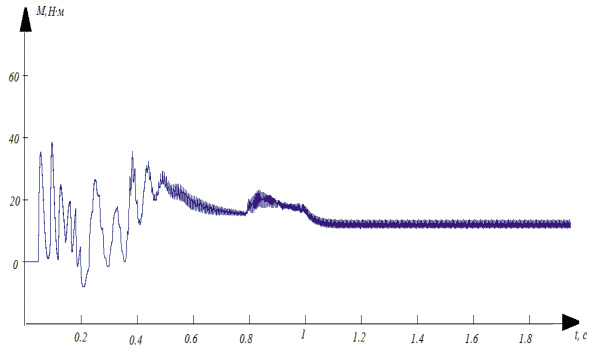
На рис. 3 представлена блок-схема асинхронного электропривода, питаемого от ПЧ с ШИМ, для измерения и расчета электромагнитного момента.
На выходе блока вычисления момента АДКР снимается сигнал, пропорциональный электромагнитному моменту М(t). На рис. 4 представлены результаты моделирования (а – с АДКР; б – с устройства вычисления момента). Для режима пуска приняты те же условия, что и ранее.
Из рис. 4 установлено, что полученные кривые мало отличаются.
Оценка абсолютной и относительной ошибок результатов имитационного моделирования, полученных с блока сравнения (для АДКР АИР90L4 P2 = 2,2 кВт, Uн.л = 380 В, 2p = 2, f = 50 Гц), показана в таблице.
Результаты имитационного моделирования
|
Наименование |
Абсолютная ошибка ∆, М∙н |
Относительная ошибка δ, % |
|
∆М, 10–3 |
δМ, 10–2 |
|
|
Измерение с помощью блока вычисления момента АДКР |
–0,015…0,072 |
–0,12…+0,12 |
|
Измерение с помощью блока вычисления момента АДКР (с ШИМ) |
–0,01…+0,05 |
–10…+10 |
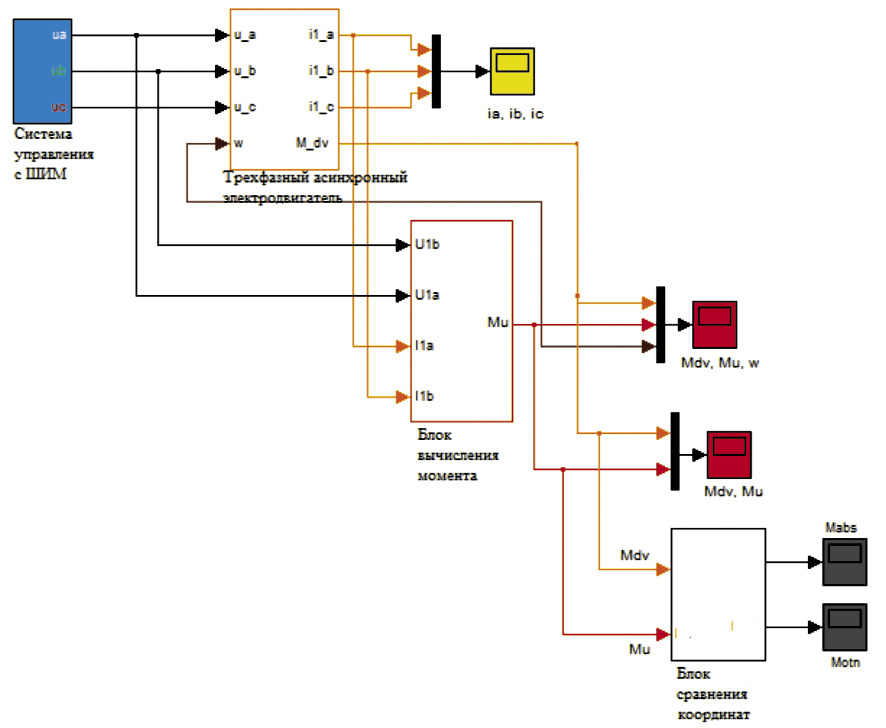
Рис. 3. Блок-схема асинхронного электропривода с ШИМ для измерения и расчета электромагнитного момента
а
б
Рис. 4. Характеристики момента М(t) АДКР с ШИМ
Из данных таблицы видно, что абсолютная и относительная погрешности измерения находятся в допустимых пределах.
Выводы
Из вышеприведенного в статье следует, что результаты измерения электромагнитного момента предлагаемым устройством не зависят от способа реализации системы управления подаваемого напряжения, а ошибка измерения находится в допустимых пределах.
Работа выполнена в рамках государственного задания «Наука» 2.1318.2014 «Разработка и исследование гибридного моделирующего комплекса энергосистемы с активной адаптивной сетью».
Рецензенты:
Гончаров В.И., д.т.н., профессор кафедры «Интегрированные компьютерные системы управления» Института кибернетики, Национальный исследовательский Томский политехнический университет,
г. Томск;
Лукутин Б.В., д.т.н., профессор, заведующий кафедрой «Электроснабжение промышленных предприятий», Энергетического института, Национальный исследовательский Томский политехнический университет, г. Томск.
Работа поступила в редакцию 19.12.2014.