



Структура современного вентильного тягового привода приведена на рис. 1 и включает в себя: источник питания (ИП), бортовой вентильный преобразователь (БВП), тяговый электродвигатель (ТЭД), датчик положения ротора (ДПР), тахогенератор (ТГ) и систему управления (СУ).
Вентильный электропривод в сравнении с приводом, включающим в себя коллекторный двигатель постоянного тока, имеет основное преимущество – может выполняться бесконтактным, что важно именно для привода на автотранспортных средствах с тяжёлыми условиями эксплуатации, где высокие значения перепадов температуры окружающей среды, запылённость и загрязнённость, вибрации и ударные нагрузки.
При сравнении различных вариантов вентильного электропривода для автотранспортных средств их коэффициент полезного действия наряду с собственной массой является одним из решающих факторов, так как применяемые в настоящее время автономные источники электроэнергии имеют ограниченный запас электроэнергии при значительной массе.
Широкое распространение получили асинхронные тяговые электродвигатели с короткозамкнутым ротором из-за простоты конструкции, высокой надёжности, приемлемой стоимости, развитой технологии производства, малых затрат на обслуживание.
Иностранными автомобильными фирмами в России разработаны тяговые асинхронные двигатели для автотранспортных средств на мощности более 30 кВт.
Тяговые синхронные электродвигатели – это, как правило, двигатели с постоянными магнитами на роторе, имеющие высокие удельные энергетические показатели, улучшенные динамические характеристики, высокую надёжность и повышенный ресурс работы.
Известно [1], что всю линейку конструкций роторов на постоянных магнитах можно разделить на две группы: с последовательным соединением постоянных магнитов по магнитодвижущей силе (или роторы с радиальным размещением постоянных магнитов) (рис. 2) и с параллельным включением их по магнитному потоку (или роторы коллекторного и когтеобразного типов) (рис. 3, 4).
Для повышения использования активных материалов тягового двигателя целесообразно применять концентрацию магнитного потока в рабочем воздушном зазоре двигателя, например, выполняя длину ротора значительно больше длины статора.
Следует отметить, что по стоимости тяговые двигатели на постоянных магнитах примерно на 30 % дороже тяговых асинхронных двигателей с короткозамкнутым ротором.
В последнее время большой интерес вызывают разработки тяговых индукторных электродвигателей, имеющих простую и низкую по стоимости конструкцию (рис. 5), однако они имеют высокую пульсацию вращающего момента и повышенный уровень шума.

Рис. 1. Структура тягового вентильного привода
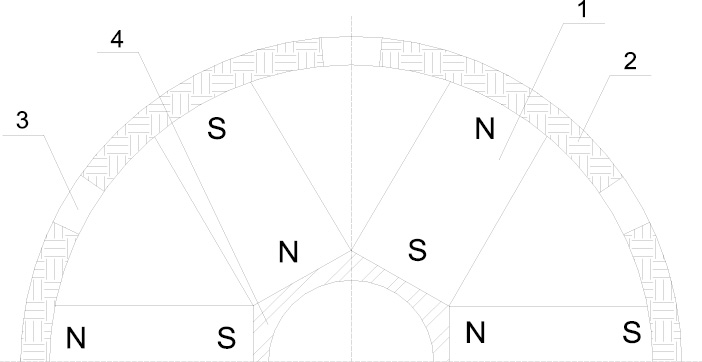
Рис. 2. Ротор с радиальным размещением постоянных магнитов:1 – постоянный магнит; 2 – магнитомягкий полюсный наконечник; 3 – немагнитный участок; 4 – магнитомягкая втулка
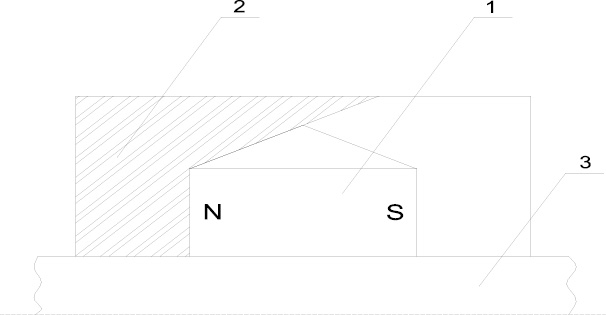
Рис. 3. Ротор когтеобразного типа: 1 – постоянный магнит; 2 – когтеобразный полюс; 3 – немагнитный вал
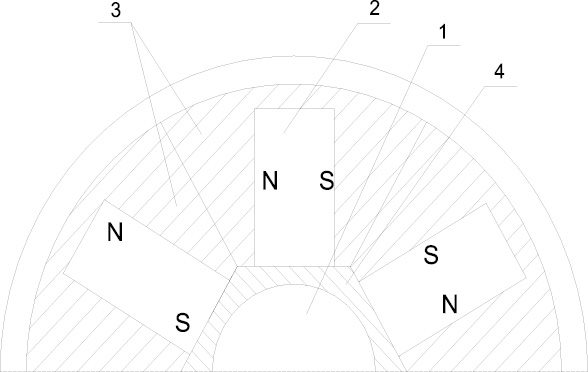
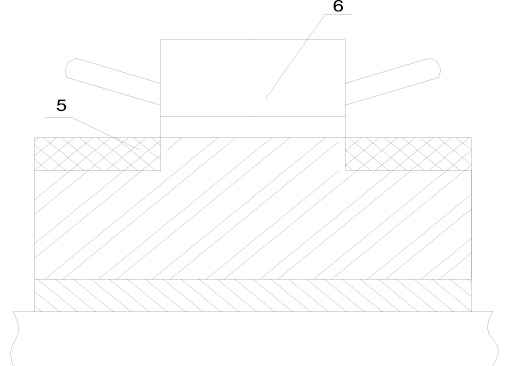
Рис. 4. Ротор с коллекторным размещением постоянных магнитов:1 – вал; 2 – постоянный магнит; 3 – магнитомягкие полюсные секторы; 4 – немагнитная втулка; 5 – немагнитное крепёжное кольцо; 6 – пакет статора
Как правило, силовая часть бортового вентильного преобразователя подключена к трёхфазной обмотке статора тягового двигателя и поэтому выполняется по трёхфазной мостовой схеме на шести силовых транзисторах (рис. 5) или же с шестифазной обмоткой также на шести транзисторах.
Полевые транзисторы и биполярные транзисторы с изолированным затвором вытеснили из бортовых вентильных преобразователей другие силовые ключи: биполярные транзисторы и тиристоры.
Благодаря низким коммутационным потерям и сравнительно низкой стоимости полевые транзисторы применяются, как правило, в приводах с низким напряжением для питания в основном электронного оборудования.
Транзисторы IGBT имеют хорошие характеристики на десятки киловатт (малая мощность управления, высокая скорость коммутации), выпускаются на токи 50–1200 А и напряжением 300–1200 В.
Наряду с развитием элементной базы силовых ключей накоплен значительный опыт по схемам бортовых вентильных преобразователей.
Датчики положения ротора предназначены для определения относительного расположения ротора и статора двигателя и управления силовыми ключами бортового вентильного преобразователя, а тахогенераторы – для измерения его частоты вращения.
Датчики положения ротора, как и тахогенераторы, должны удовлетворять довольно сложному комплексу требований. Прежде всего их размеры и потребляемая ими энергия должны быть достаточно малыми. Одним из важных условий является хорошее согласование датчика с входными цепями бортового вентильного преобразователя. От датчика требуется возможно большая кратность максимального и минимального выходного сигнала, а также его большая крутизна нарастания и спада. Часто датчики конструктивно связаны с двигателем, и к ним предъявляются такие же жёсткие требования по перепаду температур, ударам, вибрациям и т.д.
Несмотря на очевидные достоинства датчиков на основе коллекторной машины постоянного тока (простота и компактность, малые токи и работа на активную нагрузку) в тяговом приводе при сильных вибрациях, в агрессивной или взрывоопасной среде работа таких датчиков ненадёжна.
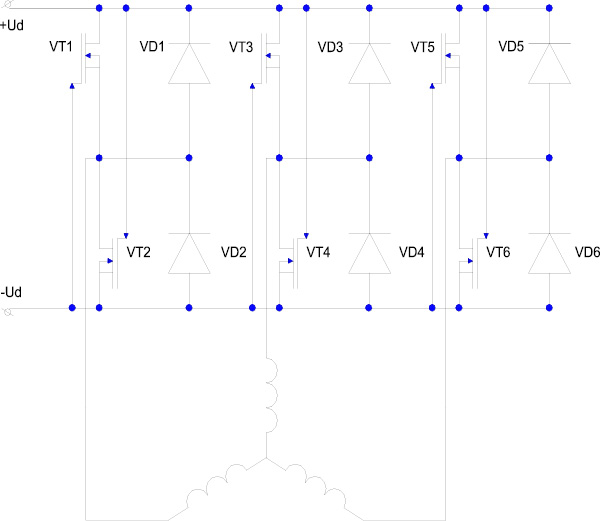
Рис. 5. Электрическая схема бортового вентильного преобразователя тягового двигателя
Одним из бесконтактных датчиков, применяемый как датчиком положения, так и тахогенератором, является фотодатчик.
В датчике можно применить две оптоэлектронные пары, работающие поочерёдно. Оптическая связь второй пары проходит посредине между отверстиями в момент прохождения оптической оси первой пары над отверстием, что позволяет увеличить частоту следования выходных импульсов в два раза при том же количестве отверстий в диске.
Основным отрицательным фактором при использовании фотодатчика являются ограничения, накладываемые на двигатель по диапазону температур, времени действия и потреблению электроэнергии.
Информацию о положении ротора двигателя и его частоте вращения можно передавать магнитным полем, используя для этого датчики магнитного сопротивления, магнитодиода и датчика Холла.
Использование датчика Холла значительно упрощает схему привода. Однако для них характерны ряд погрешностей, основными из которых являются большой разброс параметров в пределах одной партии, что усложняет их взаимозаменяемость и разные температурные коэффициенты преобразования. Даже при нормальной температуре их чувствительность может различаться более чем в 1,5 раза, что приводит к образованию пульсации выходного сигнала тахогенератора.
Ослабить влияние разброса параметров датчика Холла можно, если использовать их как датчики положения магнитного потока, а умножение сигналов на синусоидальные функции осуществить с помощью электронных множительных устройств.
Формирование синусоидальных функций угла поворота магнитного потока производится путём суммирования сигналов датчика Холла и датчика производной магнитного потока по времени с последующим интегрированием полученной суммы с помощью фильтров нижних частот.
Для работы на высоких частотах вращения можно использовать информацию об угловом положении магнитного потока путём интегрирования ЭДС двигателя без применения датчиков Холла.
Также широкое распространение получили бесконтактные датчики, работающие на переменном токе: индуктивные, трансформаторные, ёмкостные. Обилие конструктивных и электрических схем этих датчиков и использование их в разнообразных устройствах объясняется простотой, высокой надёжностью и экономичностью. Несмотря на указанные положительные свойства датчиков, работающих на переменном токе, применение некоторых из них в тяговом вентильном приводе затруднительно в силу ряда особенностей.
Так, например, емкостный датчик имеет большое внутреннее сопротивление, что делает его маломощным и сильно подверженным влиянию помех – наводок и паразитных ёмкостей. Необходимость работы на высокой частоте, а также выполнения условия согласования датчика с нагрузкой, связана с дополнительным усложнением схемы бортового вентильного преобразователя.
Среди датчиков, работающих на переменном токе, наилучшими свойствами обладает трансформаторный датчик с перемещающимся якорем. Датчик сравнительно прост в изготовлении, может быть рассчитан на достаточно большую мощность, хорошо согласуется с силовой схемой бортового вентильного преобразователя. Диапазон рабочих температур у датчика такой же, как и у самого двигателя. Существенным достоинством датчика является возможность получать гальванически несвязанные выходные сигналы.
Различают два типа трансформаторных датчиков, отличающихся конструкцией магнитопровода: одинарные и дифференциальные системы [3].
Исследования показали, что датчики с одинарной системой магнитопровода имеют небольшую кратность сигнала (2–3).
Поэтому лучшим для тягового привода является дифференциальный трансформаторный датчик с перемещающимся якорем.
Сам датчик может содержать несколько трансформаторных датчиков, поэтому в литературе принято каждый отдельный трансформаторный датчик называть просто трансформатором датчика. На рис. 6 приведена схема одного такого трансформатора. На Ш-образном сердечнике расположены три катушки. Две одинаковые катушки, расположенные на крайних стержнях, включены последовательно встречно и являются катушками возбуждения.
Катушка, расположенная на среднем стержне сердечника, является выходной. С неё снимается сигнал для управления бортовым вентильным преобразователем. Магнитный поток каждой катушки возбуждения замыкается по среднему стержню сердечника. При этом результирующий магнитный поток в среднем стержне равен разности магнитных потоков от каждой катушки. Этот магнитный поток индуктирует в выходной катушке ЭДС, величина которой зависит от положения ротора датчика, связанного с валом двигателя. Когда ротор перекрывает все три стержня трансформатора, магнитные потоки от каждой катушки возбуждения в среднем стержне равны, и ЭДС, наводимая в средней катушке, равна нулю. Если же ротор перекрывает средний стержень и один из крайних, то ЭДС, наводимая в средней катушке, максимальна.
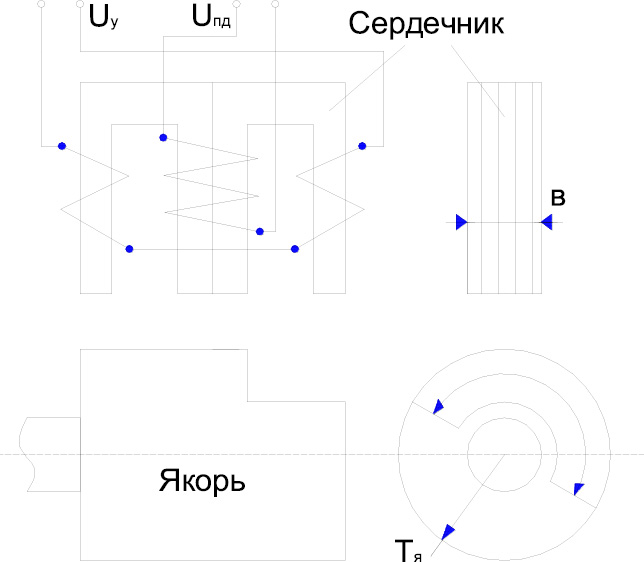
Рис 6. Трансформатор и якорь датчика положения
При вращении ротора с выходной катушки трансформатора датчика снимается последовательность импульсов переменного тока. Частота повторения импульсов определяется частотой вращения и числом пар полюсов ротора двигателя. Очевидно, что частота напряжения питания трансформатора должна быть по крайней мере на порядок выше максимальной частоты импульсов, что позволяет существенно уменьшить размеры трансформаторного датчика.
Выводы
1. Из рассмотренных тяговых вентильных электроприводов выделим привод с тяговым электродвигателем на постоянных магнитах из-за высоких удельных энергетических показателей, улучшенных динамических характеристик, высокой надёжности и повышенного ресурса.
2. Благодаря низким коммутационным потерям, сравнительно низкой стоимости для бортового вентильного преобразователя рекомендуем использовать в качестве силовых ключей полевые и IGBT транзисторы.
3. Из всего многообразия датчиков для тягового вентильного привода рекомендуем фотодатчики, датчики Холла, трансформаторные датчики использовать и как датчики положения ротора, и в качестве таходатчиков.
Рецензенты:
Долголаптев А.В., д.т.н., генеральный директор ООО «ТЭЭМП», научный руководитель проекта создания энергосберегающих приводов для электромобилей, г. Королев;
Ютт В.Е., д.т.н., профессор, зав. кафедрой «Электротехника и электрооборудование», МАДИ, г. Москва.
Работа поступила в редакцию 11.04.2013.