


Scientific journal
Fundamental research
ISSN 1812-7339
"Перечень" ВАК
ИФ РИНЦ = 1,798
NEW NOISEPROOF SIGNALS FOR THE INTELLECTUAL CHANNEL OF TELEMECHANICS

В каналах телемеханики решается или задача обнаружения сигнала, или задача различения сигналов, которую можно рассматривать как частный случай задачи обнаружения. Для решения этих задач оптимальным образом следует применять корреляционный прием. Корреляционный прием тем эффективней, чем сложнее полезный сигнал [5, 6]. Но не все сложные сигналы одинаково эффективны для решения задачи обнаружения. Наилучшими являются те, у которых отношение N главного пика функции автокорреляции (АКФ) к боковым – наибольшее. Такие сигналы (двоичные последовательности) известны и широко применяются, их называют сигналы (коды) Баркера [7]. Сигналов Баркера всего 7, самый сложный из них состоит из 13 символов и имеет отношение высоты главного пика АКФ к боковым N = 13. Это свойство позволяет надежно обнаруживать такой сигнал при отношениях сигнал/помеха С/П < 1. Однако в наиболее «тяжелых» (в смысле помехоустойчивости) каналах, например, каналах телемеханики электрифицированного железнодорожного транспорта даже сигналы Баркера не обеспечивают требуемой надежности их обнаружения.
Нами найдены сигналы, обладающие большим, чем у сигналов Баркера отношением N [2]. Способы поиска таких последовательностей описаны авторами в работе [1]. Один из способов основан на комбинировании сигналов Баркера. В качестве «материнской» последовательности берется последовательность Баркера, а затем каждый элемент материнской последовательности заменяется прямой или инверсной «дочерней» последовательностью Баркера же, в зависимости от того, ноль или единица в материнской последовательности.
Из 38 возможных парных комбинаций материнских и дочерних последовательностей нашему требованию удовлетворяют только 10 последовательностей:
3×4,1; 3×3; 3×7; 3×11; 7×3; 7×7; 7×11; 11×3; 11×7; 11×11,
где первое число – материнская последовательность второе число – дочерняя последовательность. Например, для последовательности 3×7 материнская последовательность – 1 1 0, а дочерняя – 1 1 1 0 0 1 0, тогда новая последовательность имеет вид:

На рис. 1–3 приведены АКФ новых сигналов. Видим, что 9 из них построены только из комбинаций 3, 7 и 11. АКФ сигнала 3×4,1 приведена отдельно на рис. 4, поскольку она выпадает из общей закономерности.
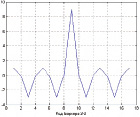
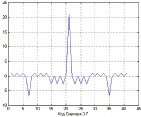
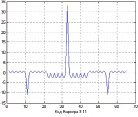
Рис. 1. АКФ сигналов 3×3; 3×7; 3×11
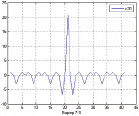
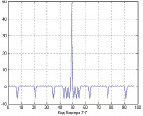
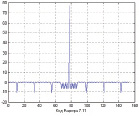
Рис. 2. АКФ сигналов 7×3; 7×7; 7×11
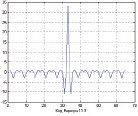
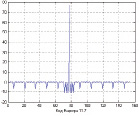
Рис. 3. АКФ сигналов 11×3; 11×7; 11×11
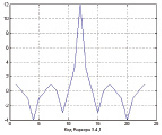
Рис. 4. АКФ сигнала 3×4,1
Для сравнения на рис. 5 приведены примеры неудачных комбинаций материнских и дочерних последовательностей.
Помехи снижают главный пик корреляционной функции и поднимают боковые пики, поэтому чем больше отношение высоты главного пика АКФ к боковым, тем выше вероятность правильного приема сигналов. Если сравнить это отношение у сигнала Баркера 13 с сигналом Баркера‒Волынской 11×11, то видим, что оно в 121/13 = 9,308… раз больше.
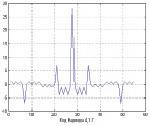
Рис. 5. АКФ неудачных сигналов
Авторами проведено исследование помехоустойчивости новых сигналов путем моделирования в программной среде LabVIEW. Результаты приведены на следующих рисунках.
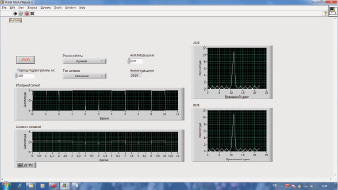
Рис. 6. 11-ти элементный сигнал Баркера и его АКФ
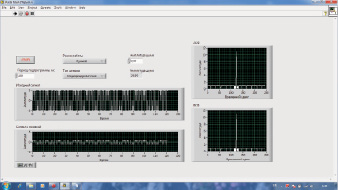
Рис. 7. Сигнал Баркера‒Волынской 11×11 и его АКФ
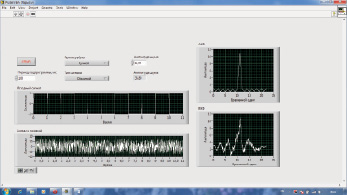
Рис. 8. 11-ти элементный сигнал Баркера + помеха (С/П = 1/14) и функция взаимной корреляции (ФВК)
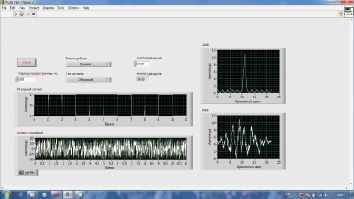
Рис. 9. 11-ти элементный сигнал Баркера + помеха (С/П = 1/19) и функция взаимной корреляции (ФВК)
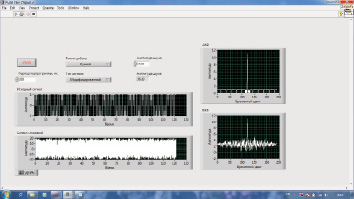
Рис. 10. Сигнал Баркера‒Волынской 11×11 + помеха (С/П = 1/19) и ФВК
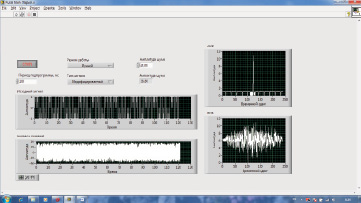
Рис. 11. Сигнал Баркера‒Волынской 11×11 + помеха (С/П = 1/43) и ФВК
Выводы
Видим (рис. 9), что при отношении С/П = 1/19 сигнал Баркера 11 не обнаруживается, т.к. главный пик ФВК соизмерим с боковыми. Кроме того, это может привести к «ложной тревоге».
Сигнал Баркера‒Волынской при этом же отношении С/П надежно обнаруживается, т.к. главный пик ФВК существенно превышает боковые (рис. 10).
Обнаружение нового сигнала становится затруднительным только при отношении С/П = 1/43.
Сигналы систем автоматики, телемеханики и связи, сформированные в соответствии с найденными последовательностями, могут быть надежно выделены из помех, во много раз более мощных, чем сами сигналы [3]. Такие сигналы могут одинаково успешно применяться и для передачи команд, и для надежной синхронизации [4].
Рецензенты:
Сергеев Б.С., д.т.н., профессор кафедры «Электрические машины» Уральского государственного университета путей сообщения (УрГУПС), г. Екатеринбург;
Иванов В.Э., д.т.н., профессор, заведующий кафедрой «Технологии и средства связи» Института радиоэлектроники и информационных технологий Уральского федерального университета (УрФУ), г. Екатеринбург.
Работа поступила в редакцию 01.10.2012.
Библиографическая ссылка
Волынская А.В., Калинин П.М. НОВЫЕ ПОМЕХОУСТОЙЧИВЫЕ СИГНАЛЫ ДЛЯ ИНТЕЛЛЕКТУАЛЬНОГО КАНАЛА ТЕЛЕМЕХАНИКИ // Фундаментальные исследования. 2012. № 11-4. С. 922-926;URL: https://fundamental-research.ru/en/article/view?id=30684 (дата обращения: 13.07.2026).