



Уже с самого начала, на стадии проектировочных расчетов, требуется создание таких узлов и элементов технологических установок, которые бы в течение всего эксплуатационного периода обеспечивали заданную точность технологического процесса. Исследования по оценке влияния различных факторов на точность говорят, что более половины определяется шпиндельным узлом (ШУ). Так как реализация самой технологии, заложенной в функциональных особенностях той или иной установки, осуществляется шпинделем и шпиндельными подшипниками, поэтому именно они вносят решающий вклад в выходные характеристики. Работа ШУ на опорах скольжения сопровождается нестабильной траекторией движения шпинделя, тепловыми смещениями подшипниковых узлов, периодическим изменением жесткости подшипников, что связано с изменением угла поворота сепаратора и т.д. Но наиболее важной проблемой является отклонение осевого положения рабочего органа (РО) шпинделя во время работы установки. Существует большое число отраслей производства, таких как лазерная, космическая промышленности и т.п., где даже незначительные погрешности недопустимы.
Цель проводимого исследования – разработка адаптивной магнитной системы аэростатического шпинделя.
Для удовлетворения поставленной цели в работе будет решен ряд следующих задач:
1. Классифицировать применяемые виды подшипников скольжения в высокоточных областях техники.
2. Разработать алгоритм управления активной стабилизации пространственного положения РО аэростатического шпинделя.
3. Предложить способ проектирования магнитной системы стабилизации, дать пример ее реализации.
4. Проверить работоспособность разработанного алгоритма методом цифрового моделирования.
Предметом исследования является алгоритм активной стабилизации пространственного положения РО аэростатического шпинделя, который заключается в том, что исполнительная часть системы, на основе электромагнитного воздействия на вращающийся РО, производит автоматическую балансировку.
Адаптивная система стабилизации пространственного положения вращающейся части аэростатического шпинделя
В современных станках для микрорезания и резания сверхтвердым инструментом, в высокоточных и высокоскоростных металлообрабатывающих станках и прецизионных лазерных установках применяют ШУ и направляющие с гидростатическими, аэростатическими, электромагнитными опорами скольжения, у которых точность, нагрузочная способность, скоростные и динамические характеристики превосходят аналогичные показатели других опор.
Применение в конструкциях высокоскоростных ШУ гидростатических подшипников приводит к ограничению частоты вращения шпинделя (из-за потерь на трение) и усложнению конструкции опорного узла. Шпиндели на электромагнитных опорах пока не нашли широкого применения в ШУ вследствие сложности и высокой стоимости шпинделей и электронных систем управления. Таких недостатков лишены ШУ с подшипниками на газовой смазке [1]. По сравнению с ШУ на других опорах скольжения аэростатические ШУ имеют ряд основных преимуществ: большая долговечность, определяемая временем работы шпинделя; большая масса, уменьшающая уровень вибрации; отсутствие времени для прогрева шпинделя. Аэростатические опоры ШУ имеют и определенные недостатки, которые заключаются в относительно небольшой жесткости и демпфирующей способности смазочного слоя, что, в свою очередь, значительно влияет на увеличение чувствительности к дисбалансу при работе. Поэтому имеется большой резерв улучшения эксплуатационных характеристик ШУ в части уменьшения возникающих дисбалансов путем использования метода активной стабилизации пространственного положения РО аэростатического подшипника.
В основе рассматриваемого алгоритма лежит принципиально иной, по сравнению с известными, подход исключения текущих смещений РО аэростатического шпинделя, без остановки технологического процесса (рис. 1). Торцевая сторона РО рассматривается в двух взаимно перпендикулярных плоскостях. В качестве объекта управления будут использоваться две парные группы электромагнитов, установленных в этих плоскостях [5]. Каждая пара электромагнитов, установленных в одной плоскости, обеспечивает реверсивный характер перемещений в условиях компенсации пространственных отклонений по своей координате, оперируя информацией, полученной от датчиков положения по этой координате.
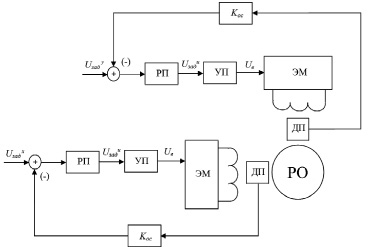
Рис. 1. Общая функциональная схема системы активной стабилизации РО аэростатического шпинделя
В процессе подготовки аэростатического шпинделя происходит напыление магнитного материала установленной толщины на поверхность РО.
Из известных в настоящее время магнитотвердых материалов, а также способов их использования в виде порошка целесообразно рассматривать микропорошковые композиции на основе редкоземельных элементов, например на основе сплавов кобальта (Co) и самария (Sm).
Методика напыления материала является современным способом нанесения однородного магнитного слоя на деталь при использовании нагретой скоростной струи, имеющей в своем составе порошковые элементы, осаждающиеся на обрабатываемом металле при ударном столкновении с ним. Для выбора оптимального метода напыления материала следует принимать во внимание форму и размерные габариты деталей; точность и характер погрешности покрытия, его технико-эксплуатационные особенности; расход на базовое и дополнительное оснащение, вид порошковых материалов и т.п.
Из всего множества технологий напыления покрытий для применения в адаптивной системе стабилизации осевого положения ротора электрической машины можно выделить следующие:
– магнетронное напыление;
– газотермическое напыление.
В качестве объекта, на который будем формировать управляющие воздействия, примем электромагнит, методика расчета параметров которого может быть выполнена согласно [2]. Электромагниты получили настолько широкое распространение, что трудно назвать область техники, где бы они не применялись. Они являются неотъемлемой частью многих устройств промышленной автоматики и аппаратуры регулирования. Электромагниты весьма разнообразны по конструктивным исполнениям, которые различаются по своим характеристикам и параметрам.
В зависимости от способа создания магнитного потока и характера действующей намагничивающей силы электромагниты подразделяются на три группы: электромагниты постоянного тока нейтральные, электромагниты постоянного тока поляризованные и электромагниты переменного тока. В качестве объектов управления предлагается использовать электромагниты постоянного тока нейтральные, где рабочий магнитный поток создается с помощью обмотки постоянного тока (рис. 2). Значение результирующей электромагнитной силы, по модулю, зависит только от величины этого потока и не зависит от его направления, а следовательно, от направления тока в обмотке электромагнита. Вместе с тем при всем разнообразии встречающихся на практике электромагнитов они состоят из основных частей одинакового назначения. К ним относятся: катушка с расположенной на ней намагничивающей обмоткой; неподвижная часть магнитопровода, выполняемого из ферромагнитного материала (ярмо и сердечник); подвижная часть магнитопровода (якорь). Якорь отделяется от остальных частей магнитопровода воздушными промежутками (зазорами) и представляет собой часть электромагнита, которая, воспринимая электромагнитное усилие, передает его соответствующим деталям приводимого в действие механизма. В нашем случае в качестве якоря выступает ферромагнитное напыление на РО. Результаты расчета параметров спроектированного электромагнита представлены в таблице.
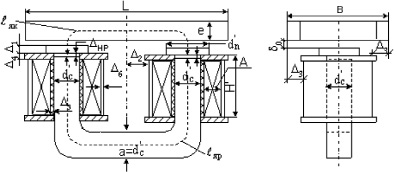
Рис. 2. Рабочий эскиз электромагнита
Результаты проектного расчета электромагнита
|
Основные расчетные параметры |
Ед. изм. |
Значение |
Основные расчетные параметры |
Ед. изм. |
Значение |
|
Критическая сила, F = Fo |
кг |
0,102 |
Толщина напыления, е |
см |
0,155 |
|
Критический зазор, δo |
см |
0,1 |
Рабочее напряжение, U |
В |
12 |
|
Определяющий размер ядра ЭМ, dc |
см |
0,467 |
Потребляемый ток, I |
А |
0,127 |
|
Высота обмотки, H′ |
см |
1,869 |
Потребляемая мощность, Р |
Вт |
1,532 |
|
Ширина намотки, А′ |
см |
0,374 |
Число витков обмотки, W |
шт. |
2107 |
|
Наружный диаметр катушки, D′н |
см |
1,867 |
Магнитодвижущая сила, IW |
А∙вит |
191,6 |
|
Внутренний диаметр катушки, D′в |
см |
0,467 |
Диаметр провода, d |
мм2 |
0,13 |
Для проверки работоспособности системы активной стабилизации пространственного положения РО аэростатического шпинделя проведено ее математическое моделирование в программе Matlab Simulink.
Структурная схема системы активной стабилизации пространственного положения, составленная с помощью программы Matlab Simulink, представлена на рис. 3. Здесь приведены две системы автоматического регулирования – система стабилизации скорости вращающегося РО аэростатического шпинделя и система стабилизации пространственного положения для координаты х (реализация системы управления отклонением по координате y может быть получена аналогичным образом). Также на рис. 3 показана взаимная связь двух систем автоматического управления.
Основным результатом имитационного моделирования является переходный процесс стабилизации пространственного положения РО, представленный на рис. 4. На рис. 4, а представлен переходный процесс по возмущающему воздействию, на рис. 4, б – тот же режим работы, только в укрупненном масштабе.
Результаты имитационного моделирования доказали, что полученные динамические характеристики удовлетворяют предъявляемым требованиям для прецизионных технологических установок (балансировка отклонений производится в микрометровом диапазоне).
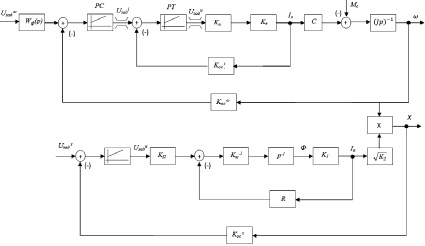
Рис. 3. Структурная схема системы активной стабилизации пространственного положения РО аэростатического шпинделя
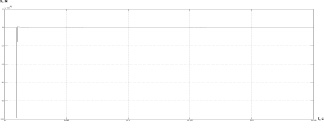
а
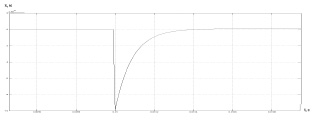
б
Рис. 4. Переходный процесс по пространственному положению (возмущающее воздействие) при активной стабилизации пространственного положения РО
Задачи на дальнейшее исследование:
1. Разработка физической модели системы активной стабилизации пространственного положения РО аэростатического шпинделя.
2. Экспериментальное исследование разработанной физической модели для уточнения параметров магнитной системы, регуляторов системы автоматического управления и т.п.
Заключение
Основные перспективы исследований и опытно-конструкторских разработок в этом направлении связаны с созданием и комплексным использованием функциональных возможностей различного рода опор. Дальнейшее совершенствование теории, развитие исследований и разработка на этой основе адаптивной магнитной системы аэростатических подшипников является актуальной научно-технической проблемой области машино- и приборостроения, решение которой позволяет значительно повысить точность и производительность технологических установок. В свою очередь, внедрение таких систем способствует увеличению параметрической надежности электрического оборудования различного назначения.
Рецензенты:
Нейман В.Ю., д.т.н., профессор, заведующий кафедрой теоретических основ электротехники, Новосибирский государственный технический университет, г. Новосибирск;
Щуров Н.И., д.т.н., профессор, заведующий кафедрой электротехнических комплексов, Новосибирский государственный технический университет, г. Новосибирск.
Библиографическая ссылка
Дымов И.С., Котин Д.А. ПРОЕКТИРОВАНИЕ АДАПТИВНОЙ МАГНИТНОЙ СИСТЕМЫ АЭРОСТАТИЧЕСКОГО ШПИНДЕЛЯ // Фундаментальные исследования. 2015. № 10-2. С. 254-258;URL: https://fundamental-research.ru/ru/article/view?id=39159 (дата обращения: 02.08.2026).