



Стремительный рост числа автовладельцев привел к значительному повышению объемов движения, частым транспортным заторам и увеличению себестоимости автомобильных перевозок. В связи с этим проблема рационального использования существующей улично-дорожной сети путем выбора оптимальной организации движения автотранспортных средств является очень актуальной.
Для эффективного управления потоками транспортной сети города и выбора оптимальных решений по проектированию транспортных сетей необходимо учитывать широкий спектр характеристик потока. Возникающие трудности связаны с нестабильностью транспортного потока и противоречивостью критериев качества управления движением. Время проезда по конкретному маршруту складывается из задержек на перекрестках и времени движения между перекрестками. Оптимизировать время движения между двумя пунктами улично-дорожной сети можно за счет сокращения потерь времени на перекрестках. Перспективной задачей является разработка микромодели транспортной динамики в узлах сети и оценка их влияния на распределение потоков по сети.
Представление транспортной сети в виде графа
Сетью называется граф, каждой дуге которого поставлено в соответствие некоторое число. Поток на графе – это некоторая функция, заданная на дугах графа. В нашем случае поток на графе задается в виде функции плотности распределения интервалов по времени между требованиями. Будем считать распределение интервалов по времени в каждом из потоков требований (каналов) подчиненным распределению Эрланга:
 (1)
(1)
Этот закон позволяет описывать потоки достаточно высокой плотности. В частности, для транспортных потоков гипотеза о распределении интервалов по времени между подряд идущими автомобилями по закону Эрланга подтверждается при интенсивности движения по каждой полосе до 500 авт./ч.
Назовем сетевые потоки неконфликтными, если на данном участке сети они не пересекаются, и конфликтными – в противном случае. Вершинами графа будем считать узловые точки – точки, в которых либо расположены источники или потребители информации, либо происходит пересечение конфликтных потоков. То есть узловые точки образуются пересечением многоканальных магистралей.
Рассмотрим узловую точку (УТ), в которой пересечение конфликтных потоков происходит следующим образом: одна часть потоков (назовем их главными) проходит через УТ беспрепятственно; требования второй части потоков (второстепенных) ожидают возникновения достаточных интервалов по времени между требованиями главных потоков для пересечения УТ. Назовем такую УТ узловой точкой первого типа (УТ I типа).
Узловую точку (УТ), в которой для возможности ее пересечения поочередно перекрывается движение для одной из групп неконфликтных потоков на фиксированное время Ti, назовем узловой точкой второго типа (УТ II типа).
Пусть {li} – множество дуг графа, {zi} – множество вершин (узловых точек). Дуга представляет собой часть многоканальной магистрали, заключенную между двумя вершинами (узловыми точками). Присвоим магистралям сети идентификационные номера WAY_i, i ∈ N. В этом случае
 .
.
Тогда можно представить граф с помощью следующих связанных матриц:
I. 
1) № – номер строки матрицы ASTREETS соответствует номеру дуги графа, соединяющей узловые точки I и II; количество строк соответствует количеству дуг графа;
2) S1 и S2 – пересекающиеся магистрали, образующие вершину I графа;
3) S3 и S4 – пересекающиеся магистрали, образующие вершину II графа;
4) Contr – тип узловой точки;
5) Pr – наличие приоритета (главная или второстепенная магистраль);
6) Len – длина дуги между узловыми точками;
7) Col – количество потоков на дуге;
8) AL – допустимость поворота налево из направления А в вершине II;
9) AS – допустимость движения прямо из направления А вершине II;
10) AR – допустимость поворота направо из направления А вершине II;
11) λА1, λА2 и т.д. – параметр λ в направлении А;
12) kA1, kA2 и т.д. – параметр k в направлении А;
13) BL – допустимость поворота налево из направления В вершине I;
14) BS – допустимость движения прямо из направления В вершине I;
15) BR – допустимость поворота налево из направления В вершине I;
16) λВ1, λВ2 и т.д. – параметр λ в направлении В.
17) kB1, kB2 и т.д. – параметр k в направлении В.
II. 
1) № строки совпадает с номером дуги графа, соединяющей узловые точки I и II в матрице ASTREETS ;
2) S1 и S2 – пересекающиеся магистрали, образующие вершину I графа;
3) λCline1, λCline2 и т.д. –параметр λ потоков, входящих в вершину I в направлении С магистрали, пересекающей данную дугу графа в узловой точке I;
4) kC line1, kC line2 и т.д. – параметр k потоков, входящих в вершину I в направлении С магистрали, пересекающей данную дугу графа в узловой точке I;
5) λD line1, λD line2 и т.д. – параметр λ потоков, входящих в вершину I в направлении D магистрали, пересекающей данную дугу графа в узловой точке I;
6) kD line1, kD line2 и т.д. – параметр k потоков, входящих в вершину I в направлении D магистрали, пересекающей данную дугу графа в узловой точке I.
Определение оптимального распределения потоков в узловой точке
Рассмотрим следующую задачу: определить оптимальное (из множества

известных способов) распределение потоков для данной вершины 
Критерием оптимизации, в зависимости от преследуемой цели, может служить:
1)  – вес вершины zn (узловой точки) для потока данного направления;
– вес вершины zn (узловой точки) для потока данного направления;
2) μ(zn) – вес вершины zn (узловой точки);
3) ωM(zn) – средняя задержка требования выбранных направлений.
Для узловой точки I типа:
1)  где М – множество выбранных направлений;
где М – множество выбранных направлений;
2)  где Ω – множество всех направлений;
где Ω – множество всех направлений;
3)  где М – множество выбранных направлений.
где М – множество выбранных направлений.
Здесь принято обозначение: Wн – средняя задержка (в секундах) в УТ одного требования второстепенного направления в потоке с параметрами распределения λ и k:
Для узловой точки II типа:
1)  где М – множество выбранных направлений, a ∈ {1; 2};
где М – множество выбранных направлений, a ∈ {1; 2};
2) 
3)  где М – множество выбранных направлений, a ∈ {1; 2}.
где М – множество выбранных направлений, a ∈ {1; 2}.
Здесь приняты обозначения:
 (треб.∙с.) – суммарная задержка всех требований данного потока за один цикл регулирования T = T1 + T2;
(треб.∙с.) – суммарная задержка всех требований данного потока за один цикл регулирования T = T1 + T2;
H(t) – число требований, прибывающих к данной точке дороги за интервал времени (0; t).
Пусть задана вершина  (с точностью до порядка Str1 и Str2). Информация о входящих потоках содержится в матрицах ASTREETS и BINTERSECTION.
(с точностью до порядка Str1 и Str2). Информация о входящих потоках содержится в матрицах ASTREETS и BINTERSECTION.
Лемма 1. Параметры распределения Эрланга, входящих в вершину  потоков, заданы:
потоков, заданы:
1) в матрице ASTREETS в строке
 – направление В;
– направление В;
2) в матрице BINTERSECTION в строке (BINTERSECTION)i в направлениях С и D;
3) в матрице ASTREETS в строке
 – в направлении А.
– в направлении А.
Оптимальное распределение потоков в узловой точке является решением задачи (в зависимости от преследуемой цели):
1) 
2) 
3) 
Выбор оптимальных параметров регулирования для узловой точки II типа
Поставим следующую задачу оптимизации функционирования узловой точки II типа: минимизировать суммарную часовую задержку μ(zn) всех требований в данном узле. При этом для каждого потока должно выполняться условие отсутствия затора:
 i = 1, 2, ..., n1; (2)
i = 1, 2, ..., n1; (2)
 j = 1, 2, ..., n2, (3)
j = 1, 2, ..., n2, (3)
где n1 – число потоков магистрали № 1; n2 – число потоков магистрали № 2. Кроме этого необходимо выполнение условия: T ≥ 2M, где М – минимальное время (в секундах), необходимое требованию для пересечения узловой точки II типа.
Задача математического (нелинейного) программирования имеет вид:
 (4)
(4)
 (5)
(5)
В результате следует получить оптимальные значения параметров регулирования T1, T2.
Алгоритм численного решения задачи (4–5) зададим как релаксационный процесс – процесс построения последовательных приближений M1, M2, ..., Mk, ... таких, что Mi ∈ Ω и Z(Mk+1) < Z(Mk).
1-й шаг. Задаем начальные значения:

и
и значения для завершения алгоритма εp = 0,01; εT = 0,5; εZ = 0,1.
2-й шаг. Находим численно (например, методом половинного деления) решение уравнения  , соответствующего условию
, соответствующего условию 
3-й шаг. Проверяем выполнение остальных неравенств системы ограничений:
 i = 1, 2, ..., n1;
i = 1, 2, ..., n1;
 j = 1, 2, ..., n2.
j = 1, 2, ..., n2.
4-й шаг. Если условия шага 3 выполнены, вычисляем  и переходим к шагу 5.
и переходим к шагу 5.
Если условия шага 3 не выполнены, то находим численно (например, методом половинного деления) решение T*1 уравнения  соответствующего условию
соответствующего условию  ; проверяем выполнение остальных неравенств системы ограничений:
; проверяем выполнение остальных неравенств системы ограничений:
 i = 1, 2, ..., n1;
i = 1, 2, ..., n1;
 j = 1, 2, ..., n2.
j = 1, 2, ..., n2.
Затем вычисляем  и переходим к шагу 5.
и переходим к шагу 5.
5-й шаг. Приняв T = T*1 (начальное значение  ) находим численно решение
) находим численно решение  уравнения:
уравнения:

Тогда новое значение  .
.
6-й шаг. Повторяем шаги 2–4 до тех пор, пока ΔZ < εz, Δp < εp, ΔT < εT.
Автором доказано, что последовательные приближения отвечают условиям сходимости к оптимальному решению M0:

Определение критических значений параметров распределения Эрланга для узловой точки II типа
Как отмечено выше, «затор» в УТ II типа не образуется при выполнении условий (2‒3). В случае распределения интервалов по времени по закону Эрланга (1) данные условия равносильны следующей системе неравенств:
 (6)
(6)
Так как
 ,
,
то приближенное решение системы относительно параметра λ (при известном параметре k) следующее:
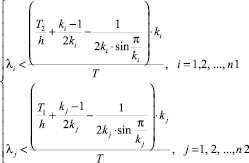 (7)
(7)
При необходимости значение параметра λ распределения Эрланга для каждого из потоков, гарантирующее отсутствие «заторов» в УТ II типа, может быть найдено численными методами с любой степенью точности путем решения (соответственно) уравнения:

или
 (8)
(8)
Определение оптимальной (из числа заданных) схемы распределения потоков по сети
Пусть задан подграф {zn}n∈V, подлежащий реорганизации. Возможные варианты реорганизации распределения потоков на сети должны быть отражены в матрицах (ASTREETS)i и (BINTERSECTION)i , i ∈ K.
Если цель реорганизации – сведение к минимуму задержек в узловых точках, то критерий оптимизации – сумма весов узловых точек:

Оптимальная схема распределения потоков по сети является решением задачи:

Если цель реорганизации – оптимизация движения потоков по данному маршруту (V, D) сети, то в качестве целевой функции следует взять

– вес маршрута, то есть время, затраченное на прохождение данного маршрута.
Здесь  – вес вершины zn (узловой точки) для потока данного направления;
– вес вершины zn (узловой точки) для потока данного направления;
μi(lj) – вес дуги lj для потока данного направления;
D – множество дуг маршрута;
V – множество вершин маршрута.
Тогда оптимальная схема распределения потоков является решением следующей задачи:

Заключение
Рассмотренные выше оптимизационные задачи базируются на гипотезе о распределении интервалов по времени между следующими подряд требованиями по закону Эрланга. Для транспортных потоков адекватность данной гипотезы проверена автором экспериментально. В работах [1–2] подробно рассматривается построение математической модели, построенной на гипотезе об эрланговском распределении интервалов по времени и ее аналитической реализации. Одной из положительных сторон модели является минимальное количество исходных данных, требующихся для расчетов показателей качества функционирования сети. Предложенное в данной работе граф-представление транспортной сети позволяет решать задачи по оптимизации распределения сетевых потоков. При наличии базы данных для конкретного участка улично-дорожной сети, построенной в соответствии со структурой матриц ASTREETS и BINTERSECTION, нетрудно осуществить компьютерную реализацию алгоритмов решения этих задач, например, в среде DELPHI.
Рецензенты:
Атрощенко В.А., д.т.н., профессор, декан факультета компьютерных технологий ФГБОУ ВПО «Кубанский государственный технологический университет» Министерства образования и науки РФ, г. Краснодар;
Видовский Л.А., д.т.н., профессор, заведующий кафедрой вычислительной техники и автоматизированных систем управления ФГБОУ ВПО «Кубанский государственный технологический университет» Министерства образования и науки РФ, г. Краснодар.
Работа поступила в редакцию 07.11.2012.
Библиографическая ссылка
Наумова Н.А. ЗАДАЧИ ОПТИМИЗАЦИИ РАСПРЕДЕЛЕНИЯ ПОТОКОВ В УЗЛАХ СЕТИ // Фундаментальные исследования. 2012. № 11-4. С. 936-941;URL: https://fundamental-research.ru/ru/article/view?id=30687 (дата обращения: 05.07.2026).