



Вентильно-индукторные двигатели (ВИД), несмотря на разнообразие конструкций и разное число фаз, можно разделить на три большие группы [5]: с самовозбуждением; с независимым электромагнитным возбуждением; с магнитоэлектрическим возбуждением. С одной стороны, ВИД представляют собой электромеханические преобразователи с электромагнитным способом преобразования энергии, форма токов фаз которых существенно отличается от формы напряжения, а с другой стороны, они являются вентильно-индукторной мехатронной системой (ВИМС) вследствие конструктивного единства электромеханического преобразователя энергии (двигателя) с силовым преобразователем (инвертором), датчика положения и микропроцессорного устройства управления. При отсутствии какой-либо из перечисленных компонент, ВИМС становится неработоспособной.
Традиционным способом управления вентильно-индукторными двигателями (ВИД) мехатронных систем является частотное управление [6], характеризующееся недостаточной жесткостью механических характеристик из-за «тяговой» характеристики двигателей [8, 9], высоким уровнем шумов и вибрации [2, 9] и большой мощностью полупроводниковых приборов инвертора. Увеличение диапазона регулирования скорости, быстродействия, точности поддержания скорости или момента и расширение функциональных возможностей ВИМС привело к необходимости применения алгоритмов векторного и бездатчикового векторного управления [3, 8].
В случае идеального холостого хода, при регулировании напряжения или тока ВИД, как аналог двигателя с последовательным возбуждением описывается передаточной функцией интегрирующего звена. Следовательно, в режиме идеального холостого хода частота вращения ВИД теоретически равна бесконечности. Фактически максимальная частота вращения холостого хода ограничивается потерями в подшипниках, магнитопроводе и обмотках электродвигателя.
Если момент нагрузки не равен нулю, то ВИД описывается передаточной функцией апериодического звена первого порядка, коэффициент передачи и постоянная времени которого изменяются в зависимости от отношения частоты вращения и момента нагрузки. Следовательно, ВИД можно рассматривать в виде звена с переменными параметрами, что дает возможность обеспечивать его работу только во второй зоне регулирования с максимальным значением отношения момента на валу ВИД к амплитуде вектора тока. В качестве понятия амплитуды вектора тока, применительно к ВИД, авторы предлагают использовать сумму текущих значений токов фаз ВИД
![]() (1)
(1)
где I – амплитуда вектора тока ВИД; in – текущее значение тока фазы; n – номер фазы. Чтобы амплитуда вектора тока не зависела от положения ротора необходимо, чтобы
![]() (2)
(2)
Условия 1 и 2 могут быть выполнены, если токи фаз имеют форму «детектированной синусоиды» со сдвигом, равным 60 электрических градусов. В этом случае токи фаз не имеют разрывов производных при tn ? , что позволяет свести к минимуму шумы и вибрации [1, 10]. Такие формы токов фаз могут быть использованы в ВИД, имеющих коэффициент одновременности работы фаз Ko = 3, то есть в четырех- и шестифазных нереверсивных ВИД (ЧНВИД, ШРВИД). При этом крутящий момент на валу будет определяться как:
![]() (3)
(3)
где Mn – момент, возникающий благодаря протеканию тока по фазе n; Ln – индуктивность фазы n; ? – угловое положение ротора.
Если суммарный момент в соответствии с выражением (3) ![]() , то
, то ![]() , то есть в процессе вращения, при токах фаз, имеющих форму «детектированной синусоиды» со сдвигом, равным 60 электрических градусов, индуктивности фаз должны изменяться линейно.
, то есть в процессе вращения, при токах фаз, имеющих форму «детектированной синусоиды» со сдвигом, равным 60 электрических градусов, индуктивности фаз должны изменяться линейно.
Применение частотно-токового способа управления позволяет формировать токи фаз ВИД без ошибки по среднему значению не зависимо от параметров ВИД и нестабильности напряжения источника постоянного напряжения инвертора [1]. При этом напряжение фаз формируется автоматически и не зависит от частоты вращения и момента нагрузки. Систему нелинейных дифференциальных уравнений, описывающих работу четырех- и шестифазных ВИМС с ЧНВИД и ШРВИД, можно заменить на систему алгебраических нелинейных уравнений. Структурная схема разомкнутой шестифазной ВИМС с частотно-токовым регулированием по методу «токового коридора» показана на рис. 1.
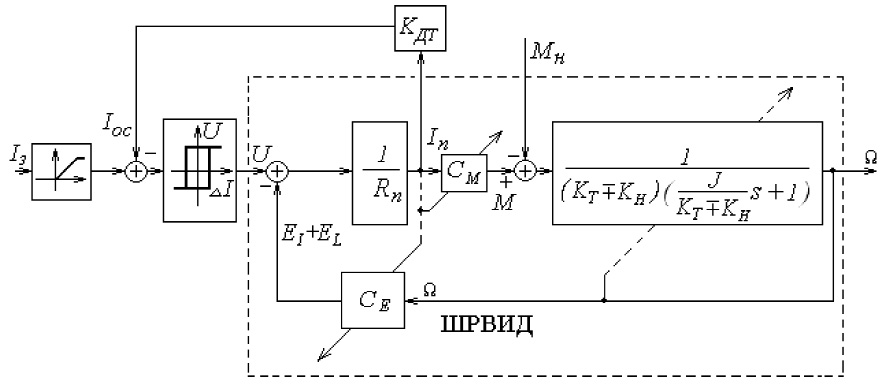
Рис. 1. Структурная схема разомкнутой шестифазной ВИМС с частотно-токовым регулированием по методу «токового коридора»
На рис. 1 обозначено: WШРВИД – передаточная функция ШРВИД; Iз – заданное значение амплитуды вектора тока; Iос – амплитуда вектора тока обратной связи; U – амплитуда вектора напряжения; EI, EL – ЭДС. от изменения тока и индуктивности; ? – частота вращения; Rn –приведенное значение омического сопротивления; ![]() – коэффициент, определяющий Э.Д.С. в зависимости от частоты вращения и нелинейно изменяющийся в зависимости от амплитуды вектора тока; KДТ – коэффициент передачи датчика тока; In – приведенное значение амплитуды вектора тока; M, Mн – моменты ШРВИД и его нагрузки;
– коэффициент, определяющий Э.Д.С. в зависимости от частоты вращения и нелинейно изменяющийся в зависимости от амплитуды вектора тока; KДТ – коэффициент передачи датчика тока; In – приведенное значение амплитуды вектора тока; M, Mн – моменты ШРВИД и его нагрузки; ![]() – коэффициент момента ШРВИД, нелинейно изменяющийся в зависимости от амплитуды приведенного вектора тока; J – суммарный момент инерции ШРВИД и механизма, приведенного к его валу; ? – частота вращения; S = d/dt.
– коэффициент момента ШРВИД, нелинейно изменяющийся в зависимости от амплитуды приведенного вектора тока; J – суммарный момент инерции ШРВИД и механизма, приведенного к его валу; ? – частота вращения; S = d/dt.
Автоматическое формирование напряжения фаз особенно важно при применении ВИД в качестве маршевых электродвигателей транспортных мехатронных систем, когда в соответствии с техническими условиями на контактную сеть постоянного тока троллейбусов и трамваев напряжение питания может изменяться от 500 до 800 В.
Если формирование напряжения фаз происходит автоматически, то внутренние обратные связи по ЭДС можно не учитывать. При этом структурная схема разомкнутой ВИМС с ШРВИД и частотно-токовым регулированием принимает вид, показанный на рис. 2.
Коэффициент момента ШРВИД, несмотря на нелинейный характер зависимости от амплитуды приведенного вектора тока, при постоянной температуре определяется однозначно. Зависимость момента от частоты вращения в механизмах с вентиляторной нагрузкой также является однозначной. В других видах механизмов, например при применении ШРВИД в качестве маршевого двигателя на электротранспорте, определить зависимость момента от частоты вращения не представляется возможным.
Суммарный приведенный момент инерции ШРВИД и механизма может изменяться в несколько раз за счет изменения массы нагрузки (например, за счет изменения числа пассажиров троллейбуса). Вследствие этого ВИД, даже с системой частотно-токового регулирования, является объектом с переменными параметрами, что приводит к необходимости применения нелинейного токового управления [7].
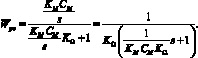
Передаточная функция ВИМС, показанной на рис. 2, в операторной форме будет иметь вид
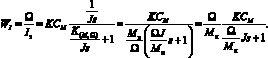 (4)
(4)
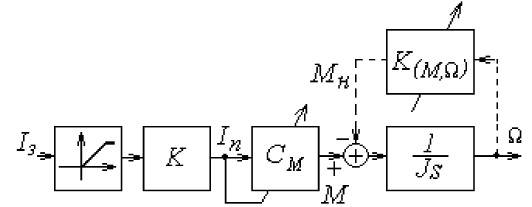
Рис. 2. Структурная схема разомкнутой ВИМС с ШРВИД, частотно-токовым регулированием и автоматическим формированием напряжения фаз: K(M, ?) – коэффициент, определяющий зависимость момента от частоты вращения
Момент ШРВИД не пропорционален амплитуде вектора тока, однако при постоянной температуре использование нелинейного блока, моделирующего зависимость ![]() в цепи обратной связи, или использование нелинейного блока, моделирующего зависимость
в цепи обратной связи, или использование нелинейного блока, моделирующего зависимость ![]() в прямой цепи, дает возможность реализовать линейную характеристику контура регулирования момента ШРВИД.
в прямой цепи, дает возможность реализовать линейную характеристику контура регулирования момента ШРВИД.
Контур регулирования момента, используемый в качестве внутреннего контура регулирования скорости, является апериодическим звеном первого порядка, имеет «тяговую» характеристику и широко применяется в ВИМС электротранспорта и других подвижных объектов. Так как увеличение коэффициента передачи пропорционального регулятора скорости, при «тяговой» характеристике контура момента приводит к увеличению диапазона регулирования и снижению его помехоустойчивости, то более целесообразно применение пропорционально-интегрального регулятора.
Передаточная функция замкнутого контура регулирования скорости следящего адаптивного вентильно-индукторного привода МС (рис. 3) равна
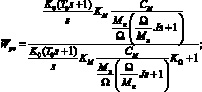 (5)
(5)
При ![]() и
и ![]() (6)
(6)
 (7)
(7)
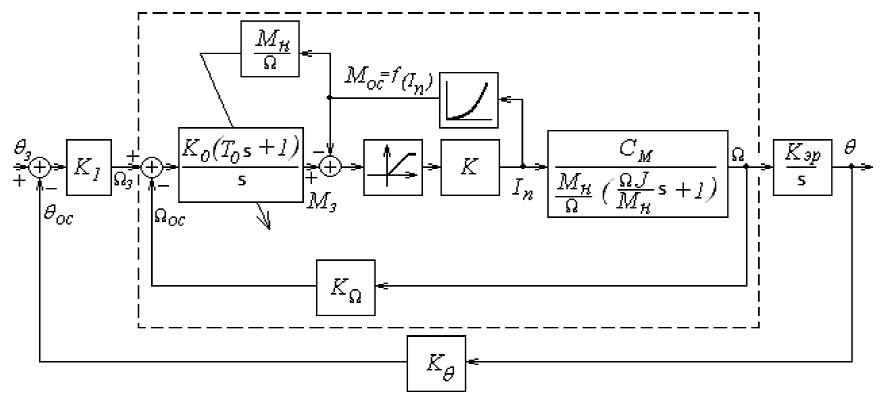
Рис. 3. Структурная схема следящего адаптивного вентильно-индукторного привода МС: Кэр – коэффициент электромагнитной редукции
Применение в качестве регулятора скорости изодромного звена с переменными параметрами позволяет увеличить статическую и динамическую жесткость контура регулирования скорости. Контур регулирования скорости с таким алгоритмом управления является адаптивной системой регулирования с параметрической настройкой [4]. Для настройки параметров изодромного звена в функции отношения момента нагрузки к скорости необходима информация о величинах и законах изменения скорости и момента ВИМС. Измерение скорости обеспечивается датчиком скорости, дифференцированием сигнала датчика положения и наблюдателем скорости. Получение информации о моменте нагрузки является сложной технической задачей, так как момент М, развиваемый двигателем, уравновешивается моментом нагрузки Мн и динамической составляющей момента
![]() (8)
(8)
Следовательно, для определения момента нагрузки, на основании выражения (8) необходимо иметь информацию как об ускорении, так и приведенном моменте инерции.
Структурная схема следящего адаптивного вентильно-индукторного привода МС с «жесткими» механическими характеристиками, разработанного в ПАО «НИПТИЭМ», показана на рис. 3.
Механические характеристики данного привода при регулировании момента являются «жесткими». При размыкании обратных связей по скорости и положению ВИМС ориентированы в первую очередь на использование в электротранспорте, кранах, лифтах, робототехнике и технологических системах с вентиляторной нагрузкой.
Выводы
1. В качестве понятия вектора тока, применительно к ВИД, предложено использовать сумму текущих токов фаз.
2. При коэффициенте одновременности работы фаз, равном трем, амплитуда векторов тока и момента не зависит от положения ротора, если ток имеет форму «детектированной синусоиды», а индуктивности фаз изменяются линейно в зависимости от угла поворота ротора. Реализовать такую форму тока можно при помощи частотно-токового управления.
3. Представление передаточных функций ВИМС с ЧНВИД и ШРВИД в виде апериодических звеньев первого порядка с переменными параметрами позволяет синтезировать адаптивные регуляторы векторов тока, момента, скорости и положения.Это улучшает параметры ВИМС и делает их инвариантными к моменту нагрузки.
Работа выполнена при финансовой поддержке РФФИ (проект № 13-08-01364).
Библиографическая ссылка
Егоров И.Н., Шабаев В.А. ВЕКТОРНОЕ УПРАВЛЕНИЕ ВЕНТИЛЬНО-ИНДУКТОРНЫМИ ДВИГАТЕЛЯМИ МЕХАТРОННЫХ СИСТЕМ // Фундаментальные исследования. – 2015. – № 12-5. – С. 891-895;URL: https://fundamental-research.ru/ru/article/view?id=39646 (дата обращения: 20.04.2024).