



Методы управления, основанные на нечеткой логике, широко распространены на практике уже давно. Однако настройка нечетких регуляторов во многом зависит от экспертных знаний. В настоящее время существуют рекомендации по выбору форм функций принадлежности, по выбору диапазонов изменения входных и выходных величин, по выбору методов фаззификации и дефаззификации [1]. Однако в результате применения всех этих методов нельзя получить оптимальный регулятор. Поэтому конечная его настройка происходит экспертным путем. В данной статье предлагается формализованная методика оптимизации нечеткого регулятора, основанная на применении генетических алгоритмов.
Данная методика предполагает выполнение следующих основных этапов:
1) синтез исходного регулятора;
2) настройка параметров генетического алгоритма;
3) выбор целевой функции;
4) оптимизация регулятора.
Этап 1 предполагает создание исходного нечеткого регулятора. Главное на данном этапе – определить границы входных и выходных переменных, задать формы функций принадлежности, базу правил нечеткого регулятора, а также методы фаззификации и дефаззификации. Подбор оптимальных настроек для термов лингвистических переменных происходит на следующих этапах предлагаемой методики [2].
Этап 2 предполагает настройку параметров генетического алгоритма. То, какие параметры необходимо настроить, сказано ниже.
Этап 3 предполагает выбор целевой функции. Предлагаемая методика позволяет выбирать любую характеристику переходного процесса (или их комбинацию) в качестве целевой функции [4].
Этап 4 включает работу непосредственно генетического алгоритма, который в зависимости от заданных ранее параметров производит оптимизацию регулятора.
Рассмотрим подробнее работу генетического алгоритма. В каждом конкретном случае в качестве целевой функции можно использовать как некоторые числовые показатели переходного процесса, такие как время регулирования или величина перерегулирования, так и интегральные показатели качества – площадь между графиком переходного процесса и единичным графиком, площадь между графиком переходного процесса и желаемым графиком [3].
В качестве варьируемых параметров используются входные и выходные лингвистические переменные нечеткого регулятора. Методика предполагает в процессе работы генетического алгоритма изменение термов лингвистических переменных (рис. 1).
На рис. 1 показаны симметричные формы функций принадлежности, но методика позволяет оптимизировать и несимметричные. В процессе оптимизации происходит варьирование значений a и b для входных и выходных лингвистических переменных. Для этого они зашифровываются в генотипе.
Методика накладывает следующие ограничения на диапазон изменения величин a и b:
1) a – от 0 до верхней границы диапазона;
2) b – от 0 до верхней границы диапазона;
3) b > = a.
Рассмотрим подробнее предлагаемую методику на примере настройки нечеткого регулятора для модели системы, изображенной на рис. 2.
Была разработана программа в среде Matlab, производящая настройку параметров нечеткого регулятора на основе выбранных пользователем характеристик работы генетического алгоритма. На рис. 3 показана экранная форма этой программы.
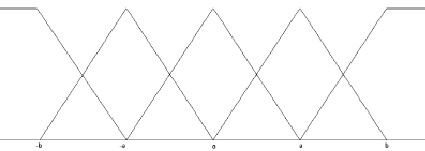
Рис. 1. Варьируемая лингвистическая переменная
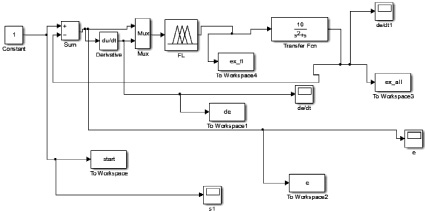
Рис. 2. Модель системы в среде Matlab, на примере которой рассматривается настройка нечеткого регулятора
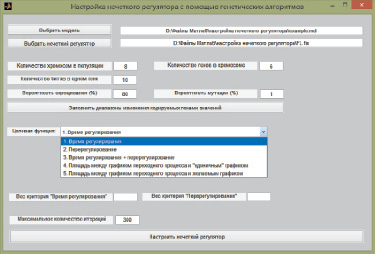
Рис. 3. Экранная форма программы настройки нечеткого регулятора в среде Matlab
Необходимо указать модель, на которой будет производиться настройка регулятора, а также указать исходный нечеткий регулятор. Далее задаются некоторые параметры генетического алгоритма:
1) количество хромосом в популяции;
2) количество генов в хромосоме;
3) количество битов в одном гене;
4) вероятность скрещивания;
5) вероятность мутации;
6) целевая функция.
Ранее было сказано, что методика позволяет использовать в качестве целевой функции любой параметр переходного процесса. Однако в данной версии программы доступны для выбора 5 наиболее популярных вариантов:
а) время регулирования;
б) перерегулирование;
в) время регулирования и перерегулирование одновременно (при этом имеется возможность указать веса обоих критериев);
г) площадь между графиком переходного процесса системы и «единичным» графиком (то есть графиком, у которого каждому значению переменной времени t соответствует выходное значение y = 1);
д) площадь между графиком переходного процесса системы и желаемым графиком (при этом программа позволяет указать желаемую форму переходного процесса аналогично тому, как это сделано в NCD-блоке в программе Matlab);
7) максимальное число итераций естественного отбора.
Оптимизируемый в рассматриваемом примере регулятор содержит две входных (e – ошибка управления, de – скорость изменения ошибки управления) и одну выходную переменную (y). Соответственно, генотип состоит из 6-ти частей: a1, b1, a2, b2, a3, b3. Границы изменения переменных: e – [0; 1,5], de – [0; 2], y – [0; 1,5].
Примем желаемую точность ∆ = 1 %. При этом согласно формуле получим число битов, кодирующих каждый ген na1 = nb1 = na2 = nb2 = na3 = nb3 = 10.
 (1)
(1)
где n – число битов в гене; xmax – верхняя граница изменения кодируемого параметра; xmin – нижняя граница изменения кодируемого параметра; ∆ – требуемая точность.
Для создания начальной популяции возьмем случайные значения варьируемых параметров a и b. В ходе своей работы данная программа преобразует значения этих параметров в генотип, а также выполняет обратную операцию – преобразование генотипа в фенотип – согласно формулам (2) и (3) соответственно.
 (2)
(2)
где d – десятичное представление кодируемого параметра; xmax – верхняя граница изменения кодируемого параметра; xmin – нижняя граница изменения кодируемого параметра; n – число битов в гене.
 (3)
(3)
где d – десятичное представление декодируемого параметра; xmax – верхняя граница изменения кодируемого параметра; xmin – нижняя граница изменения кодируемого параметра; n – число битов в гене.
Например, следующие значения параметров: a1 = 0,6; b1 = 1,2; a2 = 0,9; b2 = 1,8; a3 = 0,7; b3 = 1,4 будут зашифрованы в следующей хромосоме:
[[0, 1, 1, 0, 0, 1, 1, 0, 0, 1];
[1, 1, 0, 0, 1, 1, 0, 0, 1, 0];
[0, 1, 1, 1, 0, 0, 1, 1, 0, 0];
[1, 1, 1, 0, 0, 1, 1, 0, 0, 1];
[0, 1, 1, 1, 0, 1, 1, 1, 0, 1];
[1, 1, 1, 0, 1, 1, 1, 0, 1, 1, ]].
По выбору количества хромосом в популяции существуют некоторые рекомендации, но эта тема не рассматривается в рамках данной статьи. Для примера примем число хромосом в популяции равным 8. В качестве целевой функции используем время регулирования переходного процесса системы [5].

а

б


в г
Рис. 4. Параметры входных (а, б) и выходной (в) лингвистических переменных, выходная поверхность (г) исходного нечеткого регулятора

а

б


в г
Рис. 5. Параметры входных (а, б) и выходной (в) лингвистических переменных, выходная поверхность (г) оптимизированного нечеткого регулятора
В качестве метода естественного отбора разработанная программа использует метод «колеса рулетки». Вероятность скрещивания для данного примера установим равную 80 %, вероятность мутации – 1 %.
Параметры исходного нечеткого регулятора представлены на рис. 4.
Параметры нечеткого регулятора, полученного после применения предлагаемой методики оптимизации, представлены на рис. 5.
Результат отработки единичного воздействия, подаваемого на 0-й секунде на вход системы с исходным регулятором, показан на рис. 6, а. Время регулирования переходного процесса в системе с исходным регулятором составило 1,6 с, перерегулирование – 15 %. После оптимизации нечеткого регулятора время регулирования системы составило 0,75 с, перерегулирование составило 3 % (рис. 6, б)
Таким образом, предлагаемая методика позволяет существенно улучшить параметры системы за счет изменения параметров лингвистических переменных нечеткого регулятора. В приведенном примере время регулирования сократилось на 53 %, перерегулирование уменьшилось на 80 %.

а

б
Рис. 6. Переходной процесс системы с исходным нечетким регулятором (а) и с оптимизированным нечетким регулятором (б) при подаче единичного воздействия
Рецензенты:
Гвоздев В.Е., д.т.н., профессор, заведующий кафедрой технической кибернетики, Уфимский государственный авиационный технический университет, г. Уфа;
Куликов Г.Г., д.т.н., профессор, заведующий кафедрой автоматизированных систем управления, Уфимский государственный авиационный технический университет, г. Уфа.
Работа поступила в редакцию 10.04.2015.
Библиографическая ссылка
Мунасыпов Р.А., Ахмеров К.А., Ахмеров К.А. МЕТОДИКА ОПТИМИЗАЦИИ НЕЧЕТКОГО РЕГУЛЯТОРА С ПОМОЩЬЮ ГЕНЕТИЧЕСКИХ АЛГОРИТМОВ // Фундаментальные исследования. – 2015. – № 2-15. – С. 3275-3280;URL: https://fundamental-research.ru/ru/article/view?id=37767 (дата обращения: 19.04.2024).