



Внедрение информационных технологий в энергетике, промышленных предприятиях и инженерных объектах коммунального хозяйства требует создания многофункциональных систем управления в энергетике (СУЭ). Как правило, СУЭ разделялись на три основных класса: автоматизированные системы диспетчерского управления (АСДУ); автоматизированные системы коммерческого учёта электроэнергии (АСКУЭ); регистраторы аварийной информации (РАИ). Наряду с очевидными преимуществами создания многофункциональных систем возникают аппаратные и программные трудности. Сложность синтеза многофункциональных СУЭ можно свести к двум основным проблемам: необходимости обеспечения высоких показателей достоверности информации и оптимизации сопряжения между компонентами единой системы, особенно при интеграции компонентов разных производителей [1].
Проведенный анализ показывает, что многие многофункциональные системы создаются механическим объединением разнородных компонентов, причем для оценки качества образованного конгломерата составных частей используются показатели, не отражающие реальные параметры системы в целом [2]. Приведем несколько характерных примеров:
- в качестве показателя оперативности (быстродействия) системы предлагается использовать время передачи одного информационного сообщения по каналу связи между периферийным и центральным пунктами;
- показатель надежности системы предлагается оценивать наработкой на отказ для каждого отдельного модуля;
- достоверность информации зачастую определяется лишь по воздействию помех на сообщение, передаваемое по каналу связи.
Введенные показатели не отражают реального состояния дел, особенно при работе СУЭ в нештатных ситуациях. Поясним опасность внедрения «механически» созданных многофункциональных СУЭ.
При искаженной интерпретации показателя оперативности системы не учитываются [3]:
- вероятность искажения данных и, как следствие, отказ приемника от обработки и регистрации полученных данных;
- задержка между первичной и повторной передачами одного и того же сообщения при искажении ранее переданного;
- вероятность искажения при вводе информации от датчиков;
- вероятность искажения данных в линейных адаптерах и других устройствах, включенных в трассу доставки информации приемнику;
- задержка начала передачи уже подготовленной информации.
Для иллюстрации на рис. 1 приведена трасса для сигналов телесигнализации (ТС) электрической подстанции [1, 3].
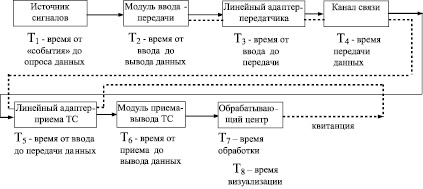
Рис. 1. Трасса для сигналов телесигнализации электрической подстанции
Проанализируем представленные на рис. 1 временные составляющие.
T1 – время от начала изменения состояния контролируемого оборудования подстанций «события» до опроса данных,
T1 = n·Tд, (1)
где n – число датчиков; Tд – временная дискретность опроса датчиков.
T2 – время сдвига между моментами ввода и передачи данных. Задержка вызывается, например, ранее начатой передачей данных от данного или другого модуля. Сдвиг является вероятностной величиной, причем максимальное значение T2 равно длительности рабочего цикла (Трц) передачи информации при условии, что в очереди на передачу нет модулей с более приоритетными данными. Будем считать, что
T2 = Трц·Коч, (2)
где Коч – коэффициент, учитывающий вероятность наличия очереди на передачу данных, 0 ≥ Коч ≤ 1.
T3 – время задержки готовности канала связи к передаче новой информации. Указанная задержка также является вероятностным параметром. Например, при использовании полудуплексного режима передачи информации разрешение на передачу формирует ведущий пункт (master), который синхронизирует очередность предоставления канала связи ведомым пунктам (slave). Если, например, для синхронизации полудуплексного канала связи используются специальные посылки – «меандры» (М), максимальное время T3 = Тм, а вероятное время
T3 = Тм Км, (3)
где Км – коэффициент, учитывающий текущее состояние по передаче синхронизирующих посылок, 0 ≥ Км ≤ 1.
T4 – длительность рабочего цикла, т.е. время передачи одного сообщения по каналу связи
 (4)
(4)
где N – число бит информационного сообщения; Fпер – тактовая частота передатчика, определяющая скорость передачи данных.
T5 – вероятное время ожидания опроса данных любого модуля
T5 = nмод Tдискр Кn, (5)
где nмод – число модулей, включенных в состав периферийного устройства интегрированного ИУС; Tдискр – интервал времени между опросами смежных модулей (дискретность опроса состояния модулей); Кn – коэффициент, учитывающий смещение опрашиваемого модуля относительно модуля, уже передающего информацию.
T6 – время ввода полученной информации в ПЭВМ.
 (6)
(6)
где N – число бит в принятом сообщении; FОЦ – скорость ввода информации в обрабатывающий центр.
T7 – время обработки полученной информации.
T7 = Lпрогр Fпрогр, (7)
где Lпрогр – длина программы обработки полученной информации; Fпрогр – скорость реализации программы (тактовая частота процессора ПЭВМ).
T8 следует учитывать, если для визуализации информации используется не экран монитора ПЭВМ, а внешний модуль, размещенный, например, в щите диспетчерском. В последнем случае
T8 = nотобр·Fотобр, (8)
где первый множитель соответствует числу бит кода выводимой информации, а второй – скорости вывода данных.
Суммарное время задержки Тзад равно:
 (9)
(9)
Для определения показателя реального быстродействия СУЭ необходимо также учитывать вероятность обнаружения приемником искажения информации, в результате чего потребуется повторная передача. В таком случае реальное быстродействие (оперативность) следует определять по формуле:
Треал. зад = Тзад + nP1× ×(Tож.квит. + Тзад + Тгот.перед), (10)
где P1 = 10–3…10–4 – вероятность однократного искажения информации помехами в канале связи; Tож.квит – время ожидания квитанции, которая подтверждает нормальный прием информации. Чаще всего диапазон времени ожидания – 1…10 с; Тгот.перед – время задержки между фиксацией факта необходимости повторной передачи информации и готовностью передатчика реализовать повторный вывод данных.
Расчет по формуле (10) показывает, что реальное быстродействие системы в три-пять раз ниже обычно указываемого в рекламных материалах СУЭ [1, 3].
Показатель надежности СУЭ необходимо выражать временем наработки на отказ для одного канала каждой выполняемой функции. Однако многие производители СУЭ в рекламных материалах приводят другой показатель – наработку на отказ не одного канала, а одного модуля. В результате «надежность» выражается цифрами наработки на отказ в 100000, а иногда 1000000 часов. Подчеркнем, что эти цифры не отражают реальную надежность СУЭ [4, 5]. Поясним сказанное анализом структуры части СУЭ, которая должна учитываться при расчете реальной надежности для одного канала данной функции (рис. 2).
Видно, что для определения надежности одного канала требуется учитывать большую часть аппаратуры всей системы. Показатель надежности зависит не только от построения модуля для выбранного вида информации, но, в еще большей степени, от общей структуры системы. Проведя расчет показателя надежности по приведенной структуре, можно показать, что без принятия дополнительных мер – углубления диагностики, введения резервирования ‒ достичь даже «более скромных» данных, оговоренных в стандарте (16000 часов), невозможно.
По «стандарту» для повышения помехоустойчивости СУЭ достаточно использовать более мощные помехозащитные коды. Однако мешающее действие помех ощущается не только в канале связи, но и в других компонентах трассы датчик-приемник информации. Проведенный анализ причин выхода из строя функциональных модулей системы дает основания утверждать, что вероятность искажающего воздействия помех на каждую входную цепь контролируемого пункта, предназначенную для ввода, например, телесигнализации, сравнима с общепринятым значением вероятности искажения «единичного сигнала» помехами в каналах связи ~10–3...10–4. Учитывая наличие сотен цепей сопряжения контролируемых пунктов c источниками информации, т.е. источниками помех, можно констатировать, что «стандартный» показатель помехоустойчивости не соответствует реальным показателям СУЭ [5, 6].
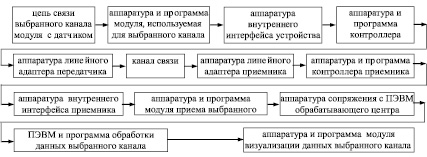
Рис. 2. Структура части СУЭ
Представим вероятность искажения любого сигнала Риск как:
 (11)
(11)
где  – отношение времени стробирования сигнала от датчика к времени цикла опроса контролируемого оборудования.
– отношение времени стробирования сигнала от датчика к времени цикла опроса контролируемого оборудования.
Вероятность возникновения необнаруживаемого искажения сигнала из-за неисправности аппаратуры любого функционального модуля Рнеиспр равна:
 (12)
(12)
где  – интенсивность отказа (неисправности) любого элемента аппаратуры и программы модуля, Рмод_i – вероятность появления не обнаруживаемого искажения из-за неисправности любого элемента аппаратуры и программы модуля.
– интенсивность отказа (неисправности) любого элемента аппаратуры и программы модуля, Рмод_i – вероятность появления не обнаруживаемого искажения из-за неисправности любого элемента аппаратуры и программы модуля.
Аналогично определим вероятности появления необнаруживаемых искажений из-за внутренних помех (Рпомех) и неисправностей аппаратуры и программы центрального контроллера (Раппарат):
Рпомех = n∙Ринт, (13)
 (14)
(14)
где n – число сигналов, передаваемых по внутреннему интерфейсу (принято равным числу датчиков, подключенных к модулю); Ринт – вероятность искажения сигнала во внутреннем интерфейсе;  – интенсивность отказов (неисправностей) аппаратуры и программы контроллера; Рнеиспр_i – вероятность появления не обнаруживаемого искажения из-за неисправности аппаратуры и программы контроллера.
– интенсивность отказов (неисправностей) аппаратуры и программы контроллера; Рнеиспр_i – вероятность появления не обнаруживаемого искажения из-за неисправности аппаратуры и программы контроллера.
Считая все указанные события независимыми, получим выражение для определения не обнаруживаемого искажения в трассе от датчика до канала связи
 (15)
(15)
Принимая значения параметров, входящих в (15): P1 = 10–3, Тстр = 10–6, Тцикл = 10–3, m = 5000,  , Рмод_i = Ринт = Рнеиспр_i = 10–3, построим графические зависимости Риск_сум (n), представленные на рис. 3.
, Рмод_i = Ринт = Рнеиспр_i = 10–3, построим графические зависимости Риск_сум (n), представленные на рис. 3.
Видно, что при формировании информационного сообщения, включая элементы защиты данных от помех и других искажений, центральным контроллером устройства контролируемого пункта вероятность появления не обнаруживаемых искажений в трассе доставки информации от датчиков до канала связи значительно превышает допустимые значения, оговоренные в стандарте 10–8 [7].
Следует подчеркнуть взаимосвязь показателя помехоустойчивости с другими определяющими параметрами СУЭ [1, 3, 4]. Например, меры, принимаемые для повышения помехоустойчивости – увеличение «мощности» помехозащитных кодов, введение заградительных фильтров и т.п., могут увеличить задержку между моментами изменения состояния объектом контроля и приема данных приемником до величины, превышающей пороговую, т.е. переводят принятые данные в разряд недостоверных.
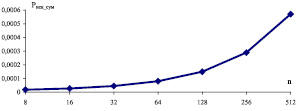
Рис. 3. Графические зависимости Риск_сум (n)
Выводы
Предложенный в статье подход основан на обобщении в единый показатель важнейших информационных характеристик многофункциональных систем управления в энергетике: быстродействие, помехоустойчивость, надежность, достоверность. Интегральная достоверность определяется через вероятность не обнаруживаемого искажения информации независимо от причины и места искажения по трассе «источник-приемник» при условии, что временной сдвиг между моментами возникновения и неискаженного приема сообщения оказался меньшим предельного, установленного в качестве критерия перевода принятого сообщения в категорию недостоверного.
Необходимо подчеркнуть, что высокие показатели качества и эффективности ИСУ не могут быть достигнуты без теоретической, структурной и системной разработки методов интеграции отдельных подсистем в единую интегрированную систему.
Рецензенты:
Портнов Е.М., д.т.н., профессор, начальник Научно-исследовательской лаборатории управляющих информационных систем Национального исследовательского университета МИЭТ, г. Москва;
Гагарина Л.Г., д.т.н., профессор, зав. кафедрой «Информатика и программное обеспечение вычислительных систем» Национального исследовательского университета МИЭТ, г. Москва.
Работа поступила в редакцию 06.03.2014.
Библиографическая ссылка
Баин А.М. НОВЫЕ ТЕОРЕТИЧЕСКИЕ ПОДХОДЫ К СОЗДАНИЮ МНОГОФУНКЦИОНАЛЬНЫХ СИСТЕМ УПРАВЛЕНИЯ В ЭНЕРГЕТИКЕ ПОВЫШЕННОЙ ДОСТОВЕРНОСТИ // Фундаментальные исследования. – 2014. – № 3-4. – С. 701-705;URL: https://fundamental-research.ru/ru/article/view?id=33738 (дата обращения: 18.04.2024).