



Значительное место в современном мире технического прогресса занимают задачи сохранения баланса, ориентации и координации движения в вертикальной стойке, ходьбе и других действиях. Таким образом, работа с множеством механизмов, управление технологическими и производственными процессами предъявляет строгие требования к тонким координационно-двигательным реакциям. Втаких условиях разные виды патологии могут выявляться самым критическим образом. Вто же время большинство заболеваний опорно-двигательного аппарата имеют свои симптомы, выраженные нарушением равновесия пациента в положении стоя, сидя или при ходьбе. Однако при клинических исследованиях наличие отдельных симптомов становится очевидным только при грубой патологии. Существуют специальные методы, которые могут выявить такие изменения намного быстрее, что позволяет провести диагностику на стадии заболевания человека, когда нет еще жалоб от пациента.
На сегодняшний день в медицине развитых стран сложилась новая медицинская специальность – постурология [9].
Постурология – это область человеческих знаний, занимающаяся изучением процессов сохранения, регуляции и управления равновесием человека при различных положениях его тела и выполнении движений в нормальном состоянии и при патологии. Поддержание равновесия, так называемого прямостояния, – динамический процесс. Тело человека иногда совершает практически незаметные, а иногда хорошо видимые в разных плоскостях колебательные движения. Характеристики колебаний, такие как частота, амплитуда, направление движения, являются чувствительными параметрами, отражающими состояние различных систем, включенных в поддержание равновесия.
Тестирование процесса равновесия в основной стойке может дать информацию о функциональном состоянии значительной части опорно-двигательной и сенсорной систем [10].
Термины стабилометрия или стабилография часто применяются как синонимы, хотя подразумевают анализ изменения позы человеком только на определенном оборудовании – стабилометрической платформе. Постурография включает стабилометрию как одну из методик.
Методики различаются видом применяемого оборудования, на котором проводят измерения различных физических параметров, связанных с перемещением центра давления, перемещением конечностей и сегментов тела, силой толчка (прыжка) и других.
Стабилометрия применяется в медицине [4], спорте [8, 3] при допуске и оценке функционального состояния, психологии [5] и других областях для количественной оценки двигательных и координационных возможностей. Метод включен в российские стандарты оказания медицинской помощи как один из способов диагностики при некоторых заболеваниях: врожденные аномалии нервной системы, травмы позвоночника и спинного мозга, болезнь Паркинсона, полиневропатии [7] и других.
Самым распространенным является метод с использованием стабилометрических платформ, он вошел в приказ Минздрава России от 29.12.2012 №1705н «Опорядке организации медицинской реабилитации».
Рассмотрим метод, который основан на регистрации колебаний тела человека или других его сегментов с помощью микромеханических датчиков. Для названия метода используются названия «акселерометрия», «пространственная стабилометрия», «3D-стабилометрия» и другие.
Данный метод диагностики имеет свои преимущества перед другими.
Метод акселерометрии существенно чувствительнее для регистрации различных колебаний, чем использование стабилометрических или пододинамометрических платформ, что позволяет получать больше информации и исследовать колебания в широком спектре частот. Есть у метода акселерометрии и свои ограничения. Он, в отличие от пододинамометрических приборов, не позволяет получить координаты положения центра тяжести тела или его проекции на плоскость опоры. Вто же время стало возможным измерять количество движения, которое выполняет тот или иной человек в течение суток и более. Здесь имеется и прямой выход на клинические задачи – это объективная оценка количества физической нагрузки для пациента во время занятий ЛФК, бытовых действий, занятий спортом.
Другая сторона таких технологий – возможность объективной регистрации тремора любого сегмента тела во всем диапазоне частот. Такие исследования стали доступны относительно недавно, например регистрация функции конечности после перенесенного церебрального инсульта. Данная технология делает возможной быструю и недорогую оценку двигательных нарушений в процессе лечения или действия фармакотерапии [2].
Контроль пространственного положения человека
В данной статье рассматривается прибор для контроля пространственного положения человека на базе МЭМС датчиков, своего рода миниатюрная навигационная система. Прибор (рис.1) содержит микромеханические инерциальные модули, закреплённые на человеке, вычислительный блок (система сбора и обработки полученных от МИМ данных), радиоканал приема и передачи данных, а также программное обеспечение отображения и визуализации движений человека.
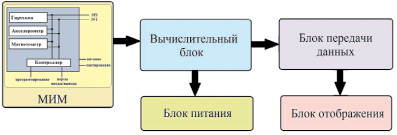
Рис. 1. Структурная схема прибора пространственного положения человека
Прибор контроля пространственного положения человека на базе МЭМС датчиков может быть хорошей альтернативой традиционной стабилометрии.
Микромеханический инерциальный модуль (МИМ) это цифровое измерительное устройство, построенное на базе микромеханических инерциальных датчиков, которые измеряют линейные ускорения, параметры магнитного поля и углы поворота.
Целью работы является построение миниатюрной навигационной системы для определения пространственного положения человека с использованием микромеханических систем, а также для реабилитации, функциональной диагностики, стабильности позы.
Для проведения расчетов и визуализации необходима математическая модель тела человека. Такая модель должна учитывать различные особенности строения тела человека, однако тогда это усложнит ее создание. Целесообразнее, чтобы модель включала только те элементы, на которые будут крепиться чувствительные элементы.
В качестве модели тела человека возьмем простейшую модель (рис.2), состоящую из 13составных частей.
Пользователь системы для измерения кинематических параметров движений человека должен получать информацию о движениях в удобном виде, что включает в себя наглядность выходной информации, возможность визуально оценить конкретные измерения. Таким образом, вычислительный блок выполняет следующие задачи.
1.Получение на выходе углов ориентации частей тела человека:
–относительно базовой системы координат;
–относительно связанных систем координат соседних сегментов.
2.Визуализация движений человека в трехмерном пространстве.
Входными данными будет набор кватернионов, соответствующий количеству сегментов тела, несущий информацию об ориентации частей тела в данный момент времени, а также длины L подвижных частей тела человека.

Рис. 2. Модель тела человека
Структурная схема разработанного алгоритма представлена на рис.3.
Уравнениями ориентации называют дифференциальные уравнения, в результате решения которых получают параметры, характеризующие положение подвижного объекта относительно выбранной системы координат. Такими параметрами могут быть углы Эйлера – Крылова, направляющие косинусы, параметры Родрига – Гамильтона и др.
Источником информации алгоритма ориентации с углами Эйлера – Крылова являются проекции ωх, ωу, ωz вектора относительной угловой скорости, получаемые на основе сигналов трех микромеханических гироскопических датчиков. Выходом алгоритма ориентации являются углы ψ, θ, γ пространственного положения человека.
Микромеханические гироскопы измеряют угловые скорости ωх, ωу, ωz , которые определяются выражениями [6]
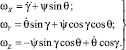 (1)
(1)

Рис. 3. Алгоритм обработки информации
Для реализации алгоритма ориентации с углами Эйлера – Крылова необходимо решить обратную задачу, то есть по составляющим угловой скорости ωх, ωу, ωz рассчитать углы ψ, θ, γ. Данный алгоритм основан на решении системы уравнений
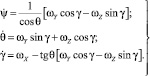 (2)
(2)
Проверка работы алгоритма проводится методом компьютерного эксперимента в программном продукте MATLAB/Simulink. На рис.4 представлена имитационная модель алгоритма ориентации, соответствующая уравнениям (2).
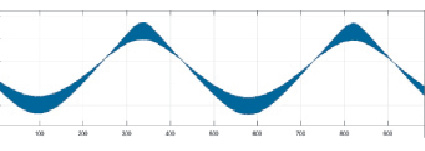
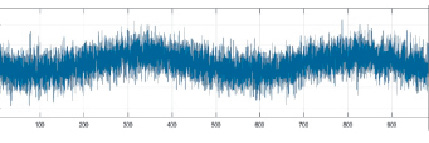
Заданным значениям угловых скоростей соответствуют рассчитанные углы ориентации человека (рис.5,а). Применяемые мэмс гироскопы имеют погрешности в виде нулевого сигнала и случайного шума, что приводит к погрешностям определения угловой ориентации (рис.5,б).
В таблице представлены числовые значения углов ориентации рассчитанные и с погрешностью в виде случайного шума и нулевого сигнала.
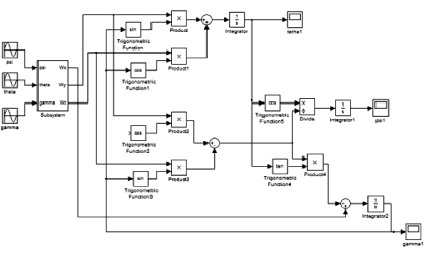
Рис. 4. Компьютерная модель алгоритма определения углового положения человека
|
ωX, Y, Z |
0 |
5 |
15 |
20 |
40 |
60 |
80 |
100 |
150 |
200 |
|
ψ |
0 |
80,63 |
248,47 |
336,45 |
234,84 |
317,63 |
314,64 |
240,98 |
74,2 |
221,5 |
|
ψш |
0,36 |
82,81 |
250,64 |
338,63 |
237,02 |
318,81 |
316,82 |
243,16 |
76,38 |
223,68 |
|
θ |
0 |
-0,3 |
1,23 |
2,18 |
2,63 |
3,09 |
0,52 |
3,53 |
1,24 |
0,87 |
|
θш |
0,36 |
1,87 |
3,11 |
4,36 |
4,81 |
5,26 |
2,7 |
5,71 |
3,42 |
3,05 |
|
γ |
0 |
5,24 |
10,82 |
9,72 |
97,76 |
1,88 |
350,8 |
311,55 |
5,64 |
4,82 |
|
γш |
0,36 |
7,42 |
13 |
11,9 |
99,93 |
4,06 |
352,98 |
313,73 |
7,82 |
7 |
а
б
Рис. 5. Пространственная ориентация тела человека: а – рассчитанная; б – с погрешностью
Заключение
Угловые скорости поворота человека, измеренные мэмс гироскопами, позволяют определить его угловую ориентацию по отношению к базовой системе координат. Однако погрешности гироскопа снижают точность вычисления. Для повышения точности и определения углов ориентации частей тела человека относительно связанных систем координат соседних сегментов необходимо использовать информацию мэмс акселерометров. Целесообразно использовать шестикомпонентный гироскоп-акселерометр [1], который позволяет определять вектор угловой скорости и вектор поступательного ускорения.
Работа выполнена в Томском политехническом университете при финансовой поддержке Миинобрнауки, ФЦП «Исследования и разработки по приоритетным направлениям развития научно-технологического комплекса России на 2014–2020годы», Соглашение №14.575.21.0068, уникальный идентификатор RFMEFI57514X0068.