



Развитие электроэнергетики в передовых странах сопровождается интенсивным поиском новых технологий для решения проблемы дальнейшего повышения эффективности энергосистем в целях оптимального распределения потоков мощности между линиями. Возможны режимы, когда требуется принудительное распределение мощности между отдельными линиями. Кроме того, управление потоками активной и реактивной мощности, согласно [4, 7, 8], является эффективным средством снижения потерь в распределительных и питающих электрических сетях. Одним из способов практически безынерционного управления потокораспределением активной и реактивной мощности является использование гибких (управляемых) линий электропередачи (ГЛЭП) [6, 9] переменного тока в рамках концепции Smart-Grid и развития активно-адаптивной сети электроснабжения. При этом актуальной задачей становится исследование режимов работы электроэнергетических систем, включающих гибкие связи, а следовательно, и разработку моделей устройств ГЛЭП.
Ввиду того, что устройства ГЛЭП являются сложными электротехническими комплексами оборудования, построение точных моделей данных устройств имеет ряд проблем, включающих низкую скорость расчета модели и, как следствие, невозможность расчета их в реальном времени, в связи с чем не менее актуальной задачей является разработка наиболее простых моделей [3] ГЛЭП, но с высокой точностью отражающих влияние на электроэнергетическую систему.
Для достижения поставленной цели были разработаны модели электротехнических устройств ГЛЭП на основе блока управляемого источника тока [2]. С целью повышения скорости расчета моделей было предложено учитывать их влияние на электроэнергетическую систему согласно вольтамперным характеристикам.
В качестве основных устройств ГЛЭП рассматривались следующие статические устройства: управляемый шунтирующий реактор (УШР), статический тиристорный компенсатор (СТК) и статический компенсатор реактивной мощности (СТАТКОМ).
Управляемый шунтирующий реактор
Управляемый шунтирующий реактор (УШР) с параллельно установленной батареей статических конденсаторов (БСК) показал свою эффективность при управлении режимами по напряжению и реактивной мощности [11], что позволяет обеспечить плавно регулируемую компенсацию реактивной мощности.
Модели устройств ГЛЭП было предложено разрабатывать на базе управляемого источника тока. Схема данной модели (рис. 1) включает в себя блок задания табличных значений (Lookup_f), в которой в относительных единицах описывается вольтамперная характеристика (ВАХ). На выходе из данного блока формируется синусоидальный сигнал тока, отстающий от напряжения на 90 эл. град. Величина и знак амплитуды токового сигнала, подходящего к управляемому источнику тока, зависит от напряжения в точке присоединения и рода тока согласно ВАХ (за положительное направление реактивного тока принято значение индуктивной его составляющей). Предложенный подход к разработке моделей ГЛЭП является универсальным и позволяет достаточно быстро получить модель сложного электротехнического устройства, опираясь только на его номинальные параметры (ток, напряжение, мощность) и вольтамперную характеристику.
При моделировании УШР была использована его ВАХ, учитывающая систему управления, направленную на поддержание отклонения напряжения в области допустимых значений, согласно номинальной мощности УШР. ВАХ УШР представлена на рис. 2, а.
Апробация модели производилась в среде SciLab Xcos согласно схеме подключения управляемого источника трехфазного напряжения U0 = 230 кВ к нагрузке S = 6 + j 18 МВА по линии сопротивлением Z = 0,15 + j 0,2 Ом. Номинальное напряжение (поддерживаемое на нагрузке) для УШР было принято равным Uн = 220 кВ. Номинальная мощность УШР равна 20 000 квар.
Изменение режима производилось следующим образом:
Режим 1. В момент времени моделирования с 0,0 до 0,1 с – проведение моделирования системы электроснабжения с активно-индуктивной нагрузкой S = 4 + j 8, МВА.
Режим 2. В момент времени с 0,1 до 0,2 с – наброс нагрузки на S = 2 + j10 МВА.
Режим 3. В момент времени с 0,2 до 0,3 с – увеличение напряжения сети до 1,15·U0.
Режим 4. В момент времени с 0,3 до 0,4 с – снижение напряжения сети до 0,85·U0.
Сравнение результатов моделирования напряжения на нагрузке с присоединенным устройством УШР и без него представлены на рис. 3. Видно, что при напряжениях меньше Uн = 220 кВ, регулирование с помощью УШР не производится, что полностью соответствует ВАХ, а при увеличении напряжения источника питания на 15 % в схеме с УШР напряжение на нагрузке значительно ближе к номинальному значению.
Помимо анализа характера изменения напряжения на нагрузке с учетом УШР были сопоставлены с расчетными значениями напряжения на нагрузке в различных режимах работы (табл. 1). При этом относительное отклонение экспериментально измеренных величин на модели электрической сети, включающей разработанную модель УШР, и расчетных значений составило не более 4,42 % (при среднем значении для всех режимов не более 1,64 %), что свидетельствует об адекватности разработанной модели. При этом большие отклонения наблюдаются при напряжениях, отличных от номинального значения и объясняются тем, что при расчетном определении напряжений на нагрузке не учитывался ее регулирующий эффект (мощность при изменении напряжении принималась неизменной).
Статический тиристорный компенсатор
Применение статических тиристорных компенсаторов (СТК) с целью увеличения пропускной способности линий электропередачи и ограничения временных перенапряжений и снижения потерь в различных режимах работы сети обосновано во многих работах [1]. Наиболее часто предлагаемая авторами модель СТК [10] имеет сложную структуру и несет в себе необходимость расчета многих параметров силовой и преобразовательной части устройства, а также разработку системы управления. Поэтому предложенный подход не теряет актуальности применительно к моделированию данного устройства на базе ВАХ СТК, представленной на рис. 2, б.

Рис. 1. Модель однофазного исполнения устройств ГЛЭП на базе источника тока в среде SciLab Xcos



а) б) в)
Рис. 2. Вольтамперная характеристика: а) УШР; б) СТК; в) СТАТКОМ

Рис. 3. Результаты моделирования напряжения на нагрузке при апробации УШР, кВ
Таблица 1
Результаты апробации разработанной модели УШР
|
Номер режима |
Напряжение на нагрузке, кВ |
||||||
|
Без УШР |
С УШР |
||||||
|
Эксперимент на модели |
Расчетные |
Отклонение, % |
Мощность УШР, квар |
Эксперимент на модели |
Расчетные |
Отклонение, % |
|
|
1 |
220,65 |
220,43 |
0,10 |
608,96 |
220 |
219,9 |
0,05 |
|
2 |
211,5 |
210,42 |
0,51 |
0 |
211,5 |
210,42 |
0,51 |
|
3 |
243,66 |
247,41 |
1,52 |
20000 |
231,66 |
232,36 |
0,30 |
|
4 |
180,1 |
172,48 |
4,42 |
0 |
180,1 |
172,48 |
4,42 |
|
Среднее: |
1,64 |
Среднее: |
1,32 |
||||
Результаты апробации разработанной модели СТК, представленные на рис. 4, показали, что в отличие от УШР в рабочую область по регулированию напряжения входят и его отрицательные отклонения при напряжениях меньше Uн = 220 кВ, однако максимальная выработка реактивной мощности снижается со снижением напряжения.
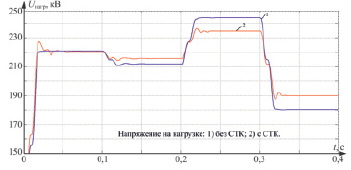
Рис. 4. Результаты моделирования: напряжение на нагрузке при апробации СТК, кВ
Таблица 2
Результаты апробации разработанной модели СТК
|
Номер режима |
Мощность СТК, квар |
Напряжение на нагрузке, кВ |
Отклонение, % |
|
|
Эксперимент на модели |
Расчетные данные |
|||
|
1 |
608,96 |
220 |
219,9 |
0,05 |
|
2 |
– 11709,4 |
220 |
220,62 |
0,28 |
|
3 |
20000 |
231,66 |
232,36 |
0,30 |
|
4 |
– 15623 |
190,5 |
188,46 |
1,08 |
|
Среднее: |
0,43 |
|||
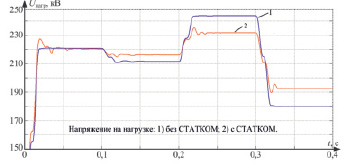
Рис. 5. Результаты моделирования напряжения на нагрузке (апробация СТАТКОМ), кВ
Таблица 3
Результаты апробации разработанной модели СТАТКОМ
|
Номер режима |
Мощность СТАТКОМ, квар |
Напряжение на нагрузке, кВ |
Отклонение, % |
|
|
Эксперимент на модели |
Расчетные данные |
|||
|
1 |
608,96 |
220 |
219,9 |
0,05 |
|
2 |
– 11709,4 |
220 |
220,62 |
0,28 |
|
3 |
20000 |
231,66 |
232,36 |
0,30 |
|
4 |
– 20000 |
192,5 |
192,94 |
0,23 |
|
Среднее: |
0,21 |
|||
Сравнение экспериментальных и расчетных данных показало (табл. 2), что их отклонение не превышает 1,08 % (при среднем значении не более 0,43 %), что свидетельствует об адекватности разработанной модели.
СТАТКОМ
Применение устройств СТАТКОМ, согласно [5], позволяет в широких пределах регулировать потребляемую/генерируемую реактивную мощность, обеспечивая повышение коэффициента мощности до 0,97, при отсутствии снижения мощности генерации, обусловленного снижением напряжения. Модель устройства СТАТКОМ также разрабатывалась на базе ВАХ, представленной на рис. 2, в.
Результаты моделирования СТАТКОМ (рис. 5) показывают большую эффективность данного устройства при регулировании отклонения напряжения в отрицательную сторону по сравнению с СТК (на участке времени моделирования 0,35–0,4 с). Сравнение результатов моделирования напряжения в узлах с расчетными значениями (табл. 3) показало, что модель также адекватна (максимальное отклонение – не более 0,3 %, среднее – не более 0,21 %).
Выводы
1. Предложен подход к разработке моделей устройств ГЛЭП является универсальным и позволяет достаточно быстро получить модель сложного электротехнического устройства, опираясь на его номинальные параметры и ВАХ.
2. Предложенный подход был апробирован в процессе создания моделей УШР, СТК и СТАТКОМ системе SciLab Xcos. Результаты моделирования подтвердили адекватность моделей на основании величины отклонения экспериментальных значений от расчетных параметров, составившей в среднем не более 2 %.
3. Разработанные модели могут быть использованы при изучении как отдельных устройств ГЛЭП, так и электроэнергетических систем, содержащих ГЛЭП, а также при составлении балансов активной и реактивной мощности в таких сетях и разработке алгоритмов управления в рамках развития концепции Smart-Grid.
Рецензенты:
Бочкарёв С.В., д.т.н., доцент, профессор кафедры «Микропроцессорные средства автоматизации», ФГБОУ ВПО «Пермский национальный исследовательский политехнический университет», г. Пермь;
Казанцев В.П., д.т.н., доцент, профессор кафедры «Микропроцессорные средства автоматизации», ФГБОУ ВПО «Пермский национальный исследовательский политехнический университет», г. Пермь.